Foot shock absorbing structure of robot
A robot and foot technology, applied in springs/shock absorbers, motor vehicles, mechanical equipment, etc., can solve problems affecting robot movement, poor foot shock absorption performance, component damage, etc., to improve walking stability, The effect of novel design and improved shock absorption capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
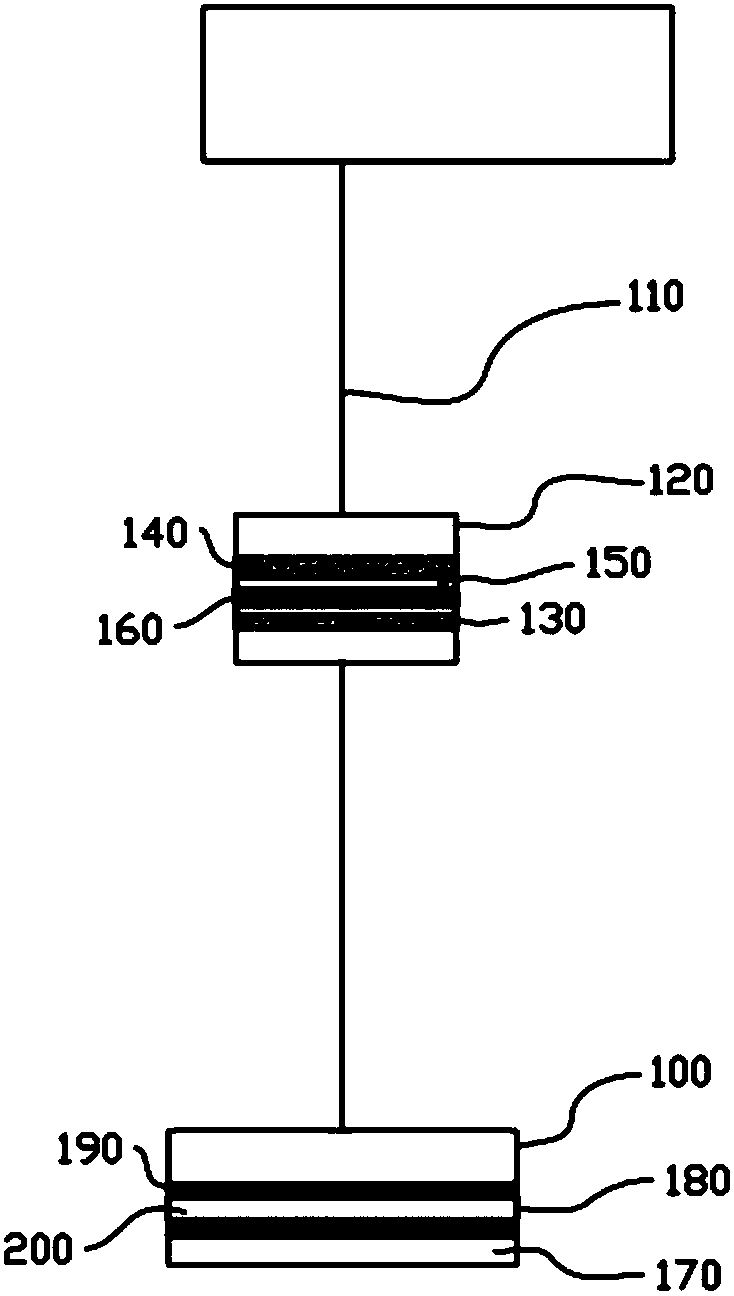
[0016] see figure 1 , a foot shock absorbing structure of a robot, including a foot joint 100, a leg joint 110 is arranged on the top of the foot joint 100, a rotating running assembly 120 is arranged in the middle of the leg joint 110, and one end of the rotating running assembly 120 is provided with On the upper ankle joint bearing, the other end of the rotating operation component 120 is provided with a lower ankle joint bearing. The rotating operation component 120 adopts a large-angle joint bearing to realize the large-angle deflection movement of the foot mechanism, and a shock-absorbing pad is installed on the rotating shaft of the leg joint 110 , the shock pad includes a lower compartment steel plate 130, an upper compartment steel plate...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap