

Six-freedom-degree parallel robot
A degree of freedom and robot technology, applied in the field of medical devices, can solve problems such as large cumulative error at the end, inconvenience for doctors, and large operating environment space, and achieve the effect of small and compact mechanism design and small space occupation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
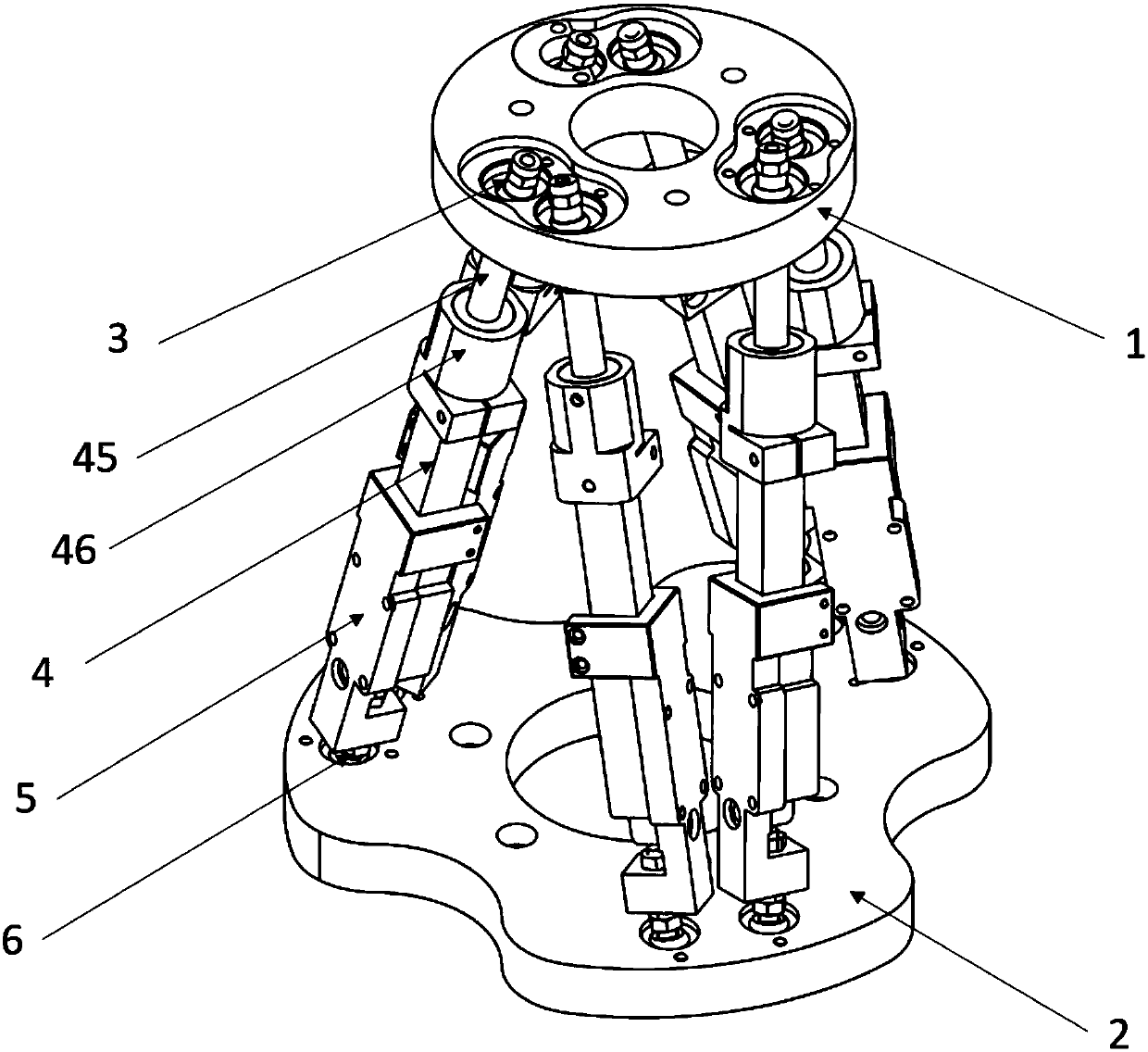
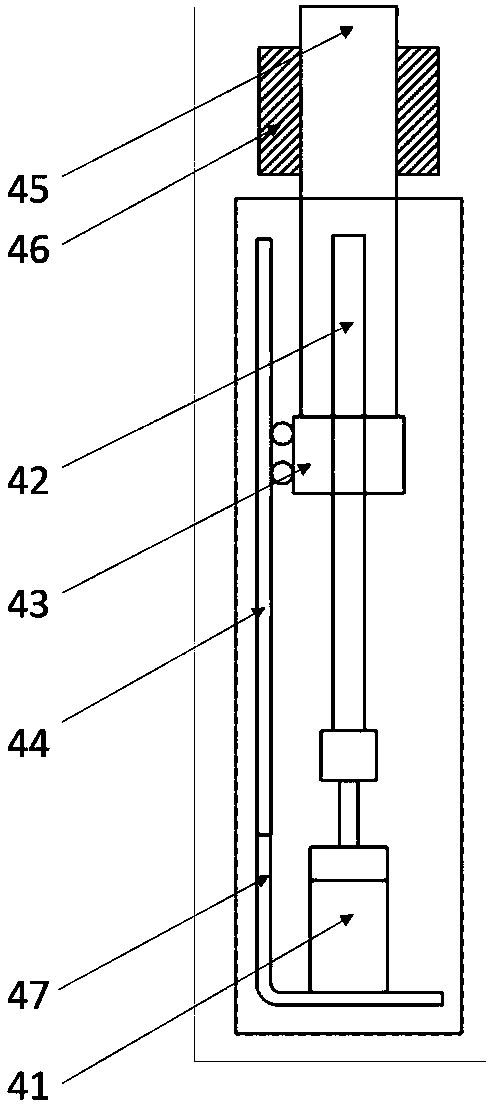
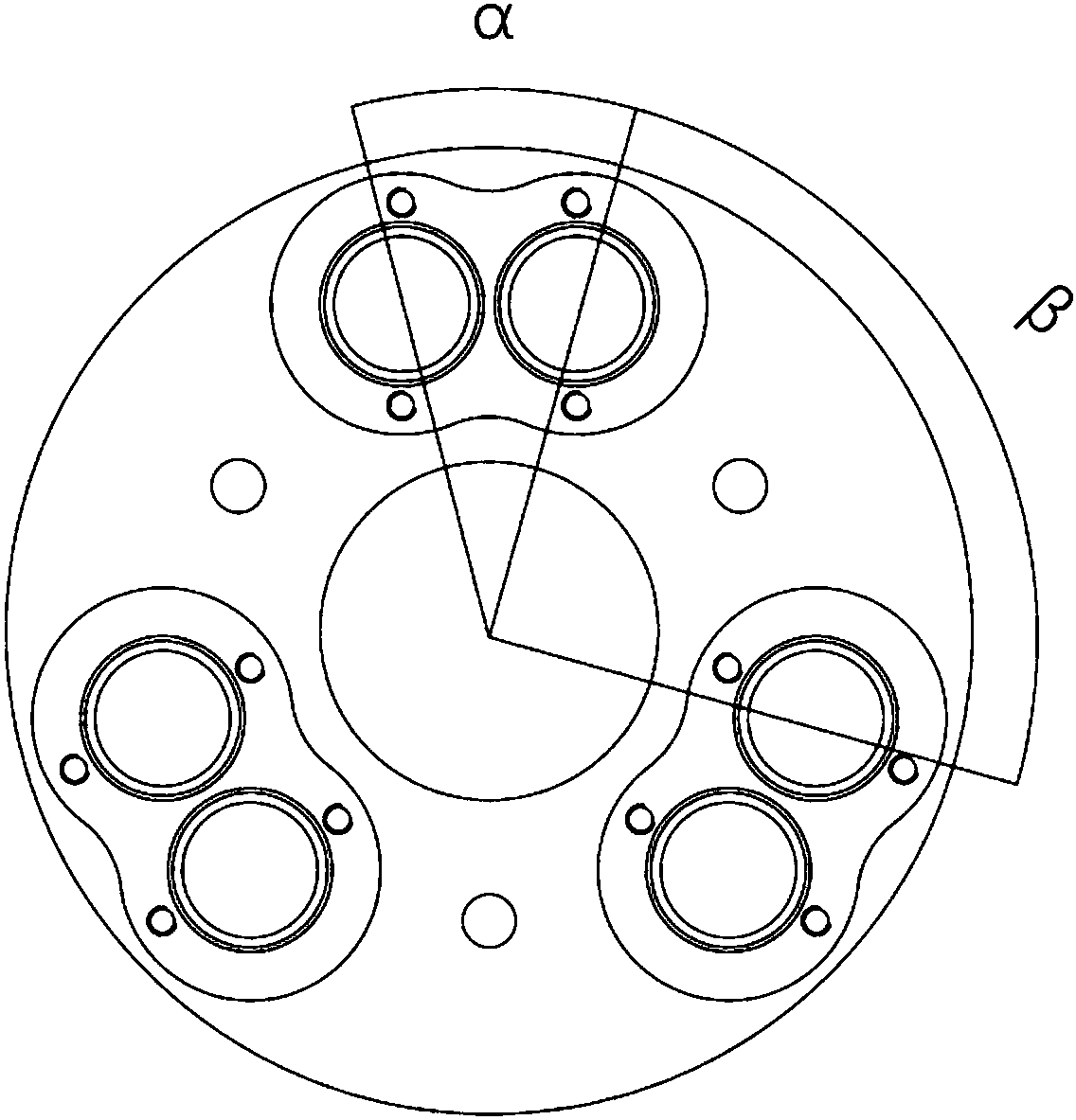
[0028] Such as figure 1 As shown, a six-degree-of-freedom parallel robot includes an upper platform 1, a lower platform 2, a motion chain and a control device. The upper platform 1 and the lower platform 2 are connected by six motion chains, such as image 3 As shown, the six kinematic branch chains are arranged in the form of spokes, and for the upper platform, the distribution angle α between the hinge points of each kinematic branch chain 上 and angle β 上 The included angles are 30° and 90° in turn, and for the lower platform, the distribution angle α between the hinge points of each of the kinematic branches 下 and angle β 下 The included angles are 20° and 100° in turn; the motion branch chain includes the first spherical joint 3, the miniature elect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More