

Four-foot bionic walking robot
A walking robot, the fourth technology, applied in the direction of motor vehicles, transportation and packaging, can solve the problems of high manufacturing cost, inability to realize steering, poor load-bearing capacity, etc., to achieve low manufacturing cost, strong load-bearing capacity, flexible and natural steering. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on The embodiments of the present invention and all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
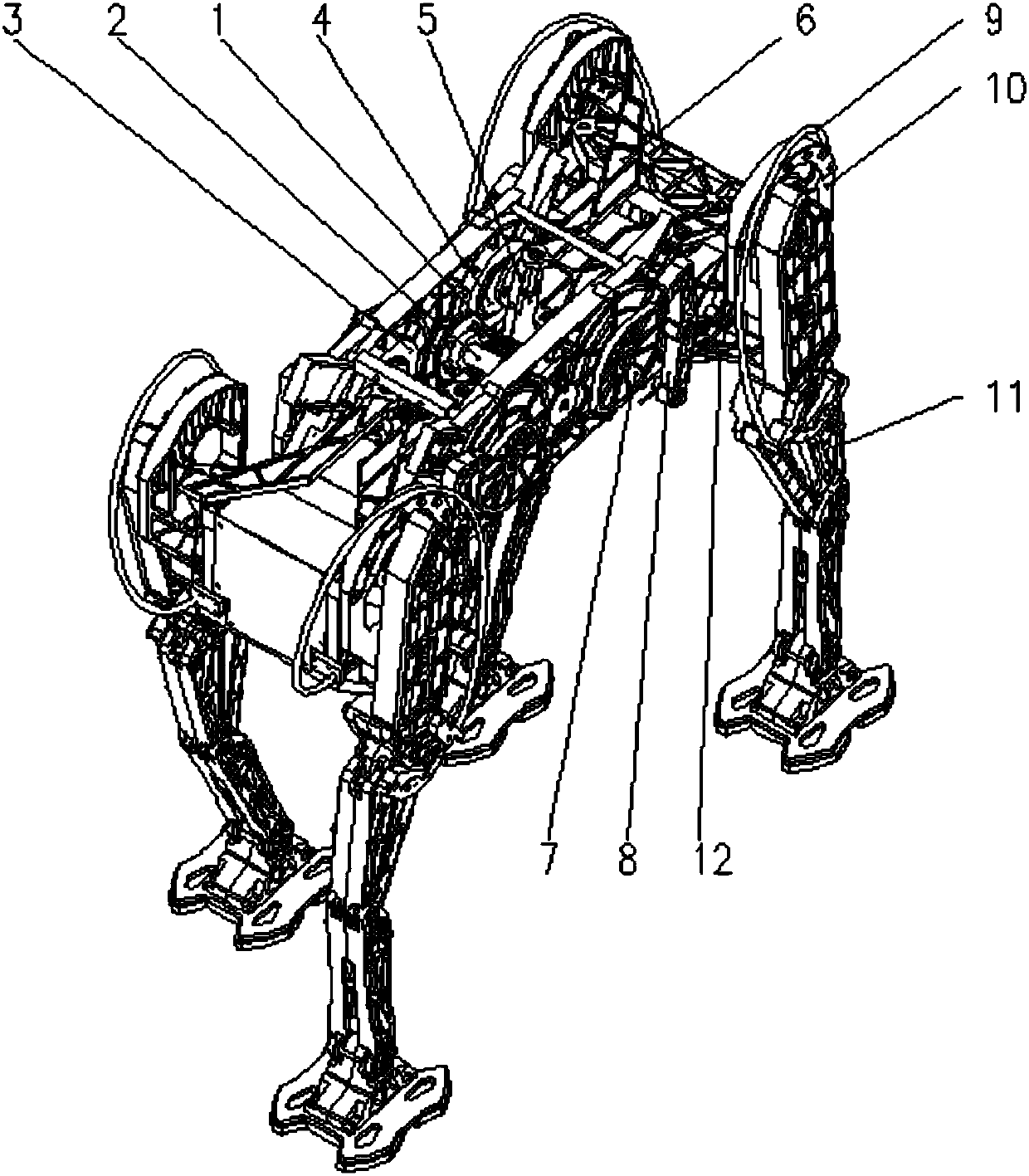
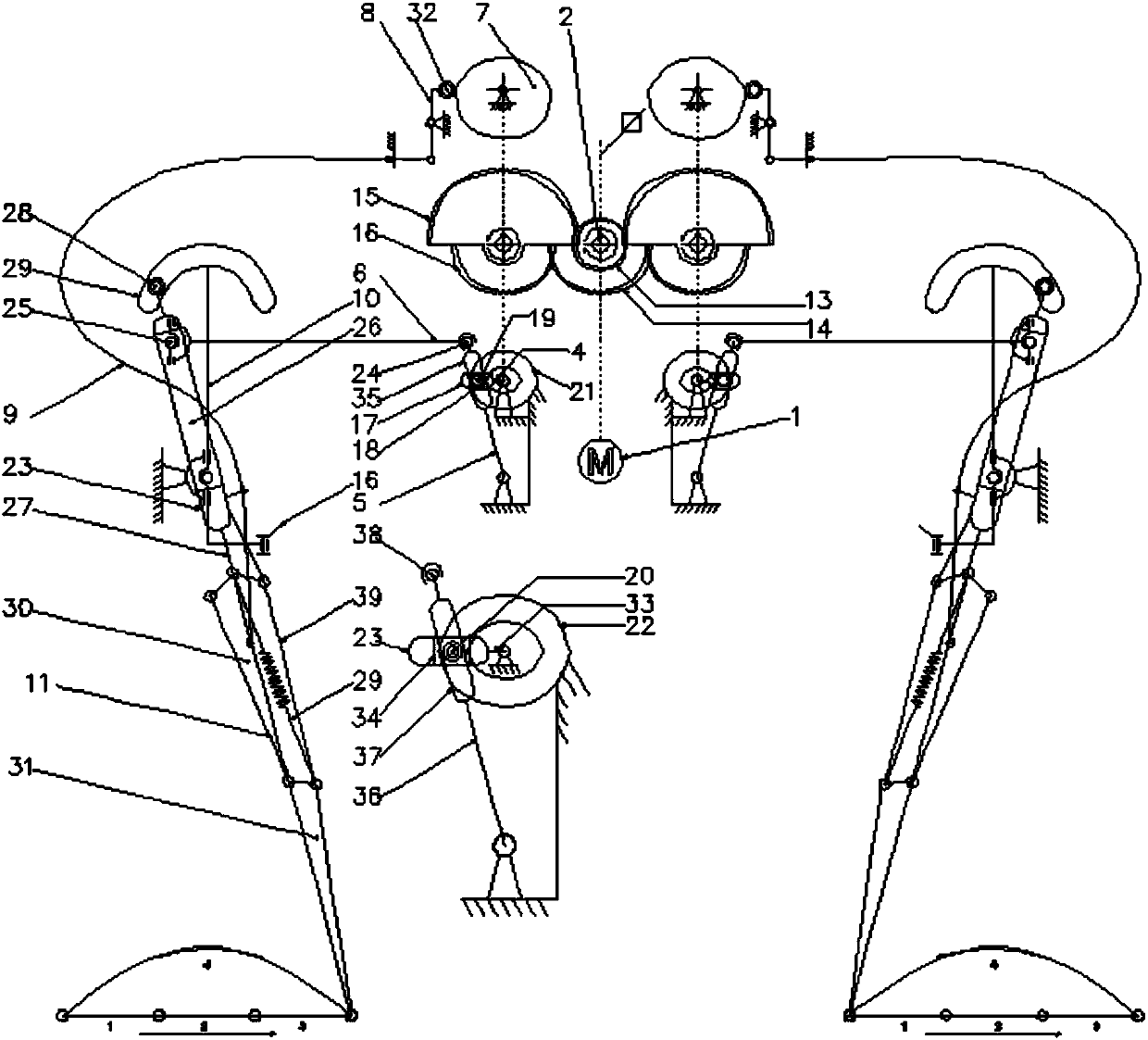
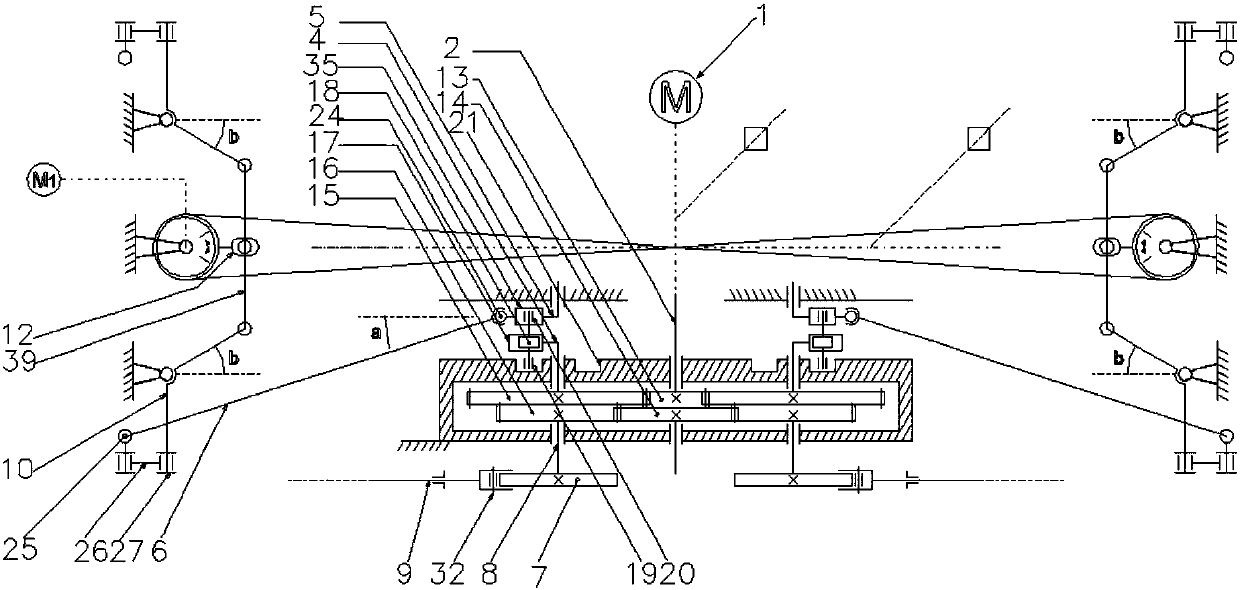
[0014] like Figure 1-3 As shown, the present invention discloses a quadruped bionic walking robot, comprising a drive motor 1, a central shaft 2, a gear box 3, a first inner crank 4, a first inner swing link 5, a space connecting rod 6, a cam 7, a lift Leg lever 8, steel wire cable 9, bladder body connector 10, leg 11, steering mechanism 12, first gear 13, second gear 4, third gear 15, fourth gear 16, first chute 17, the first One slide block ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More