

Interactive identity authenticating and tracking method and system based on multi-modal intelligent robot
An intelligent robot and identity authentication technology, applied in the field of intelligent robots, can solve the problems of lack of single-modal information, inability to recognize and track interactive identities, etc., and achieve the effect of improving recognition accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
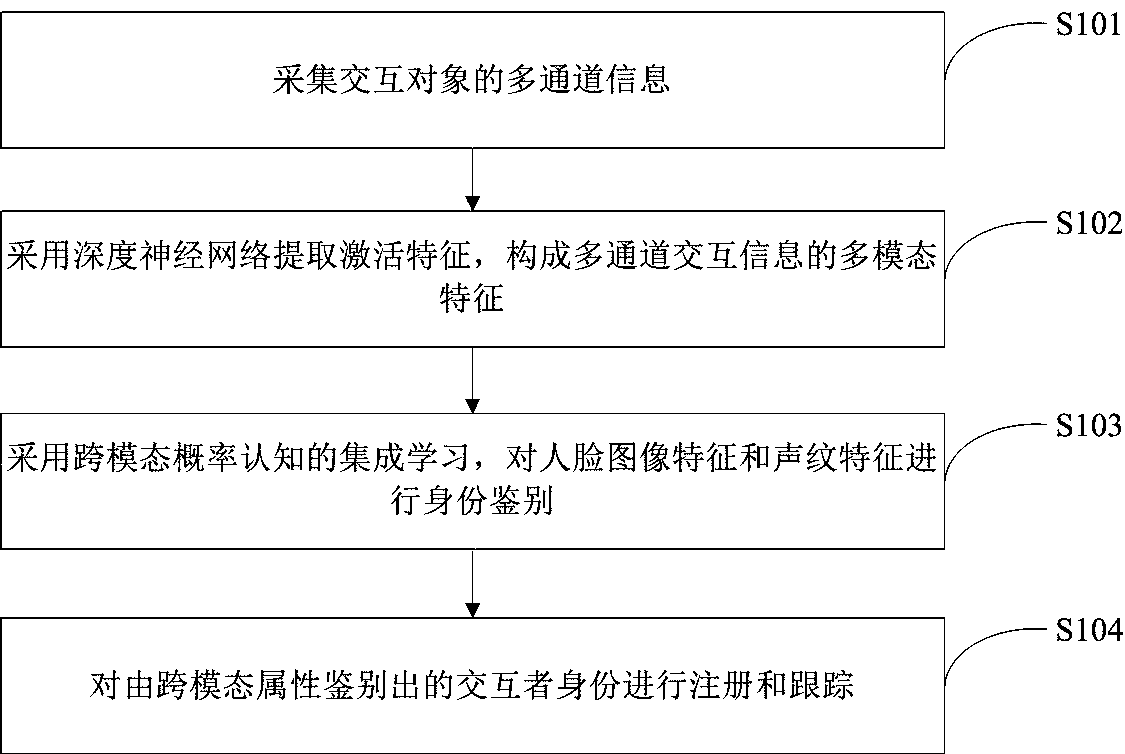
[0056] like figure 1 As shown, a kind of interactive identification and tracking method based on multimodal intelligent robot of the present invention comprises the following steps:
[0057] Step S101: collecting multi-channel information of interactive objects;
[0058] Step S102: using a deep neural network to extract activation features to form multi-modal features of multi-channel interactive information;
[0059] Step S103: using integrated learning of cross-modal probability cognition to identify the face image features and voiceprint features;
[0060] Step S104: Register and track the identity of the interactor identified by the cross-modal attribute.
Embodiment 2
[0062] like figure 2 As shown, another kind of interactive identification and tracking method based on multimodal intelligent robot of the present invention comprises the following steps:
[0063] Step S201: collecting multi-channel information MI of an interactive object, including:
[0064] As a possible implementation, the intelligent robot is an intelligent dialogue robot, including: a microphone array, a binocular camera, an infrared camera and a depth sensor;
[0065] Step S2011: collect the voiceprint and voice information VA of the interactor through the microphone array of the intelligent dialogue robot, and collect information for identifying the interaction identity and understanding the interaction intention;
[0066] Step S2012: Collect the face RGB image FV and body information of the interactor through the binocular camera of the intelligent dialogue robot, and collect information for identifying the interaction identity and understanding the interaction inten...
Embodiment 3
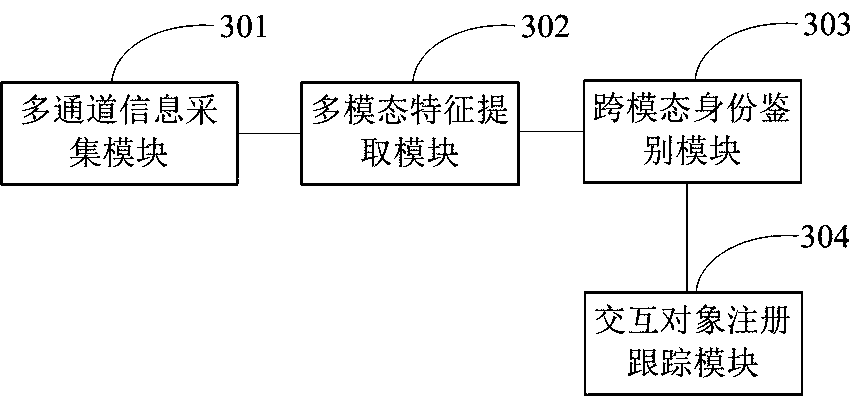
[0086] like image 3 As shown, a kind of interactive identification and tracking system based on multimodal intelligent robot of the present invention comprises:
[0087] A multi-channel information collection module 301, configured to collect multi-channel information of interactive objects;
[0088] The multimodal feature extraction module 302 is used to extract activation features using a deep neural network to form multimodal features of multi-channel interactive information;
[0089] The cross-modal identity identification module 303 is used to identify the face image features and voiceprint features by adopting integrated learning of cross-modal probability cognition;
[0090] The interactive object registration tracking module 304 is configured to register and track the identity of the interactor identified by the cross-modal attribute.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More