UAV obstacle avoidance device and obstacle avoidance method based on millimeter wave radar and vision fusion
A millimeter-wave radar and unmanned aerial vehicle technology, applied in the direction of measuring devices, radio wave reflection/re-radiation, radio wave measurement systems, etc., can solve the data processing tasks of embedded processors, multi-optical sensors, long range, Problems such as the inability to obtain obstacle distance information, etc., achieve the effect of overcoming the difficulty of heavy data processing and the small amount of data processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
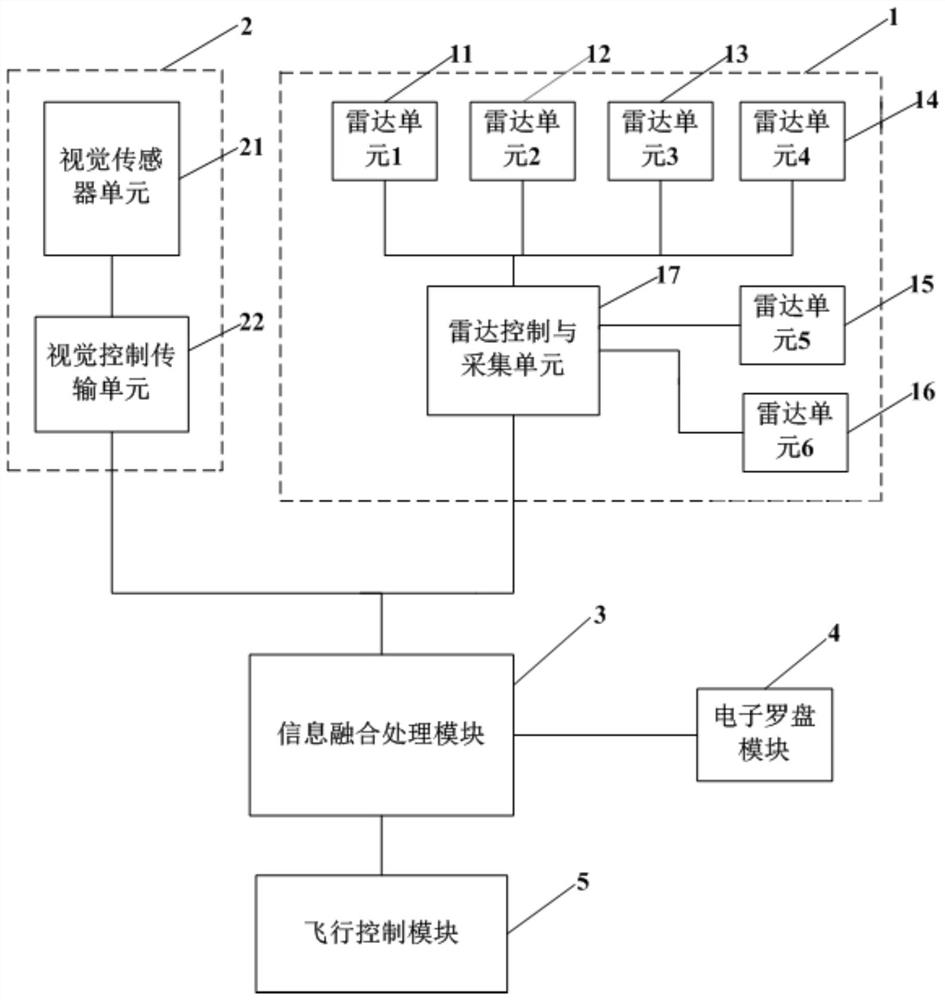
[0030] refer to figure 1 , which is a schematic diagram of a UAV obstacle avoidance device based on millimeter wave radar and vision fusion of the present invention; wherein the UAV obstacle avoidance device based on millimeter wave radar and vision fusion includes: radar module 1, vision module 2 , electronic compass module 4, information fusion processing module 3, flight control module 5; wherein radar module 1 includes 6 radar units, are respectively radar unit 1, radar unit 2, radar unit 3, radar unit 4, radar unit 5, radar unit unit 6 and radar control and acquisition unit 17 , the vision module 2 includes a vision sensor unit 21 and a vision control transmission unit 22 .
[0031] The radar control and acquisition unit 17 includes 6 input terminals, which are respectively electrically connected to the output terminal of the radar unit 1, the output terminal of the radar unit 2, the output terminal of the radar unit 3, the output terminal of the radar unit 4, the output ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com