

Multi-actuator underwater robot robust adaptive motion control device and method
An underwater robot, robust adaptive technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., to avoid chattering phenomenon, achieve the effect of robust adaptive precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
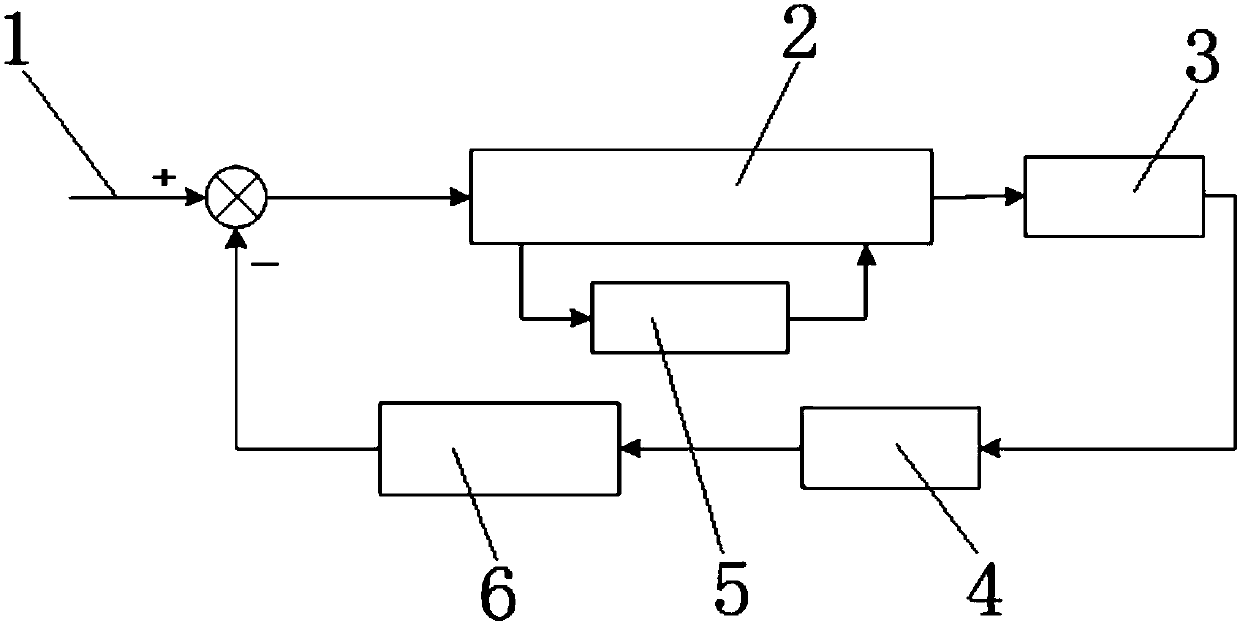
[0025] The present invention provides a multi-execution underwater robot robust adaptive motion control device, such as figure 1 As shown, include a second-order sliding mode controller 2, the second-order sliding mode controller 2 has a control gain adaptive device 5, and the second-order sliding mode controller 2 is used to construct a virtual second-order sliding mode control law; control distribution module 3 Control distribution of multiple actuators, and establish nonlinear model 4 of actuators on the basis of control distribution, nonlinear model 4 of actuators control and construct underwater robot kinematics dynamics model 6, underwater robot kinematics dynamics model 6 and the expected signal of the expected module 1 control the second-order sliding mode controller 2 together.
[0026] The present invention ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More