Deformable three-habitat robot
A technology of robots and electric motors, applied in the field of amphibious deformation robots, can solve problems such as volume reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described below in conjunction with the accompanying drawings.
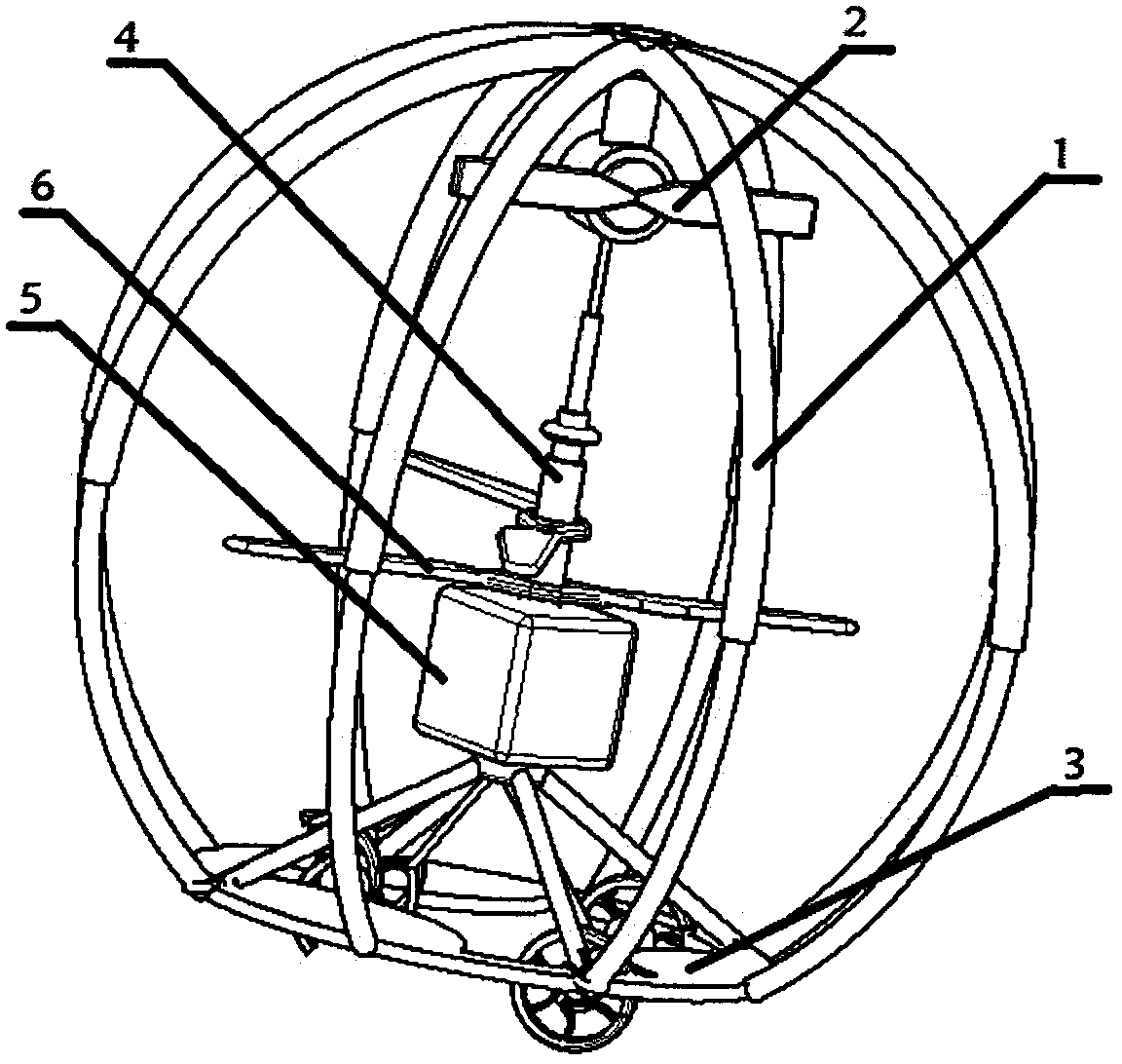
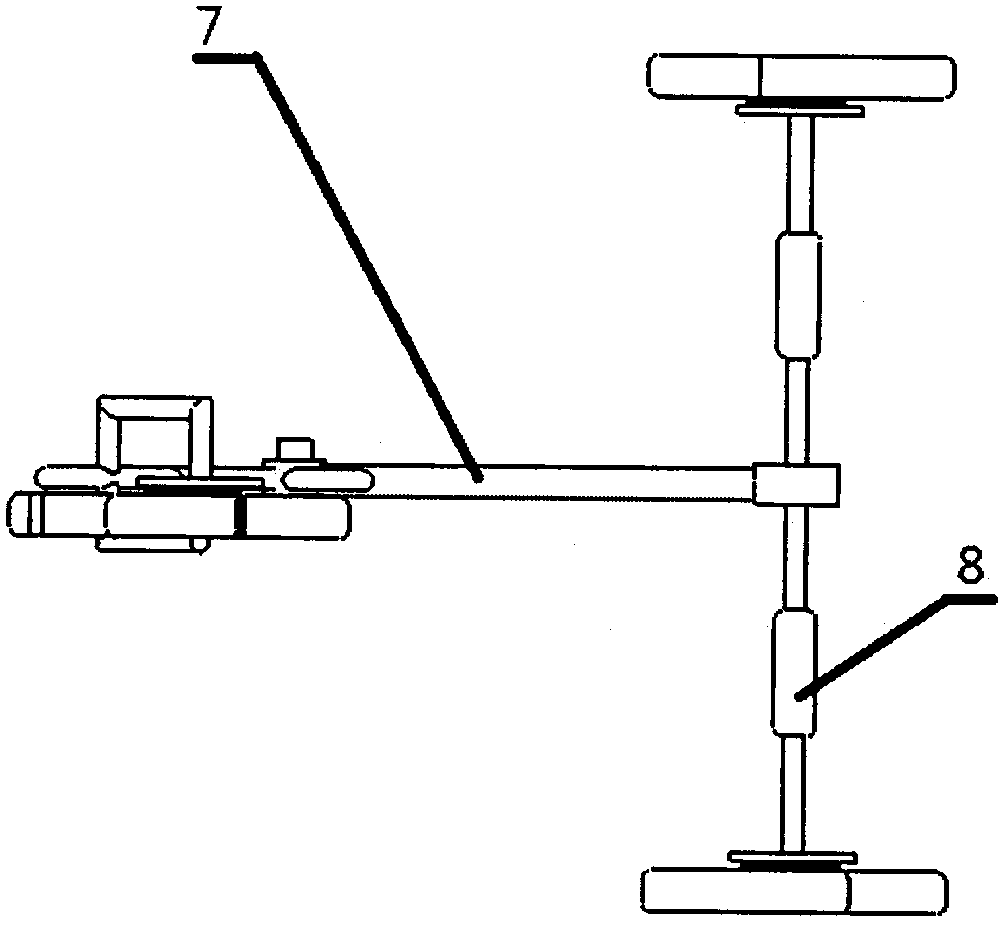
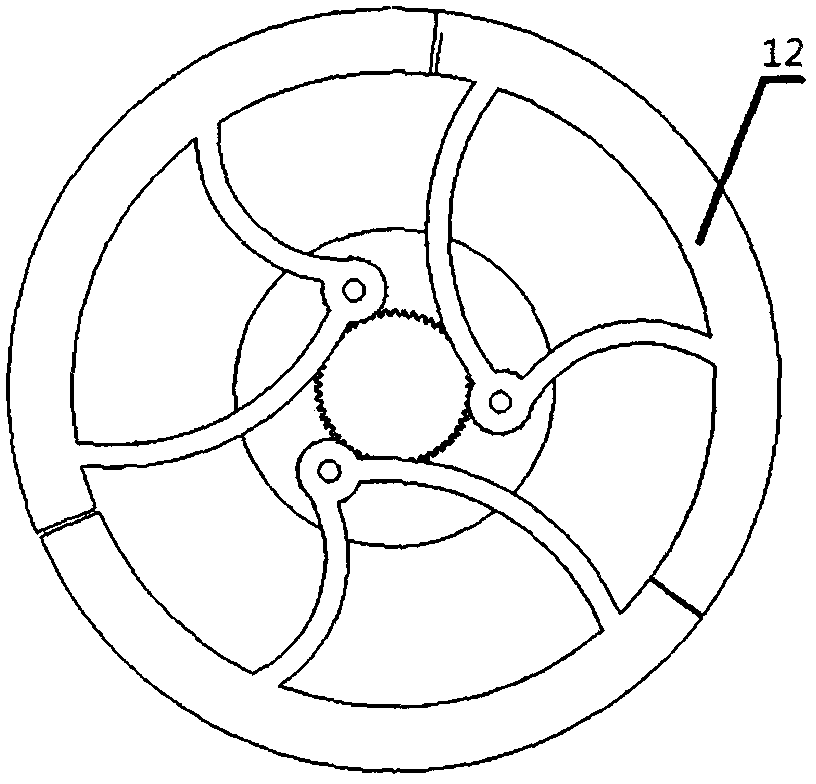
[0014] Such as figure 1 As shown, a deformed amphibious robot consists of a spherical shell, 1 signal receiver, 2 chassis, 3 electric telescopic rods, 4 motors, 5 propellers, 6 transmission shafts, 7 clutches, 8 three-blade paddles, 11 sensor gyroscopes and a remote controller. The sensor gyroscope is inside the motor 5, the motor 5 is at the lower part of the electric telescopic rod 4, the bottom of the motor 5 is connected to the bearing through the transmission shaft 7, and drives the three-blade paddle 11, the external thread of the electric telescopic rod 4 matches the internal thread of the motor 5, and is close to the ground state Next, the motor 5 drives the electric telescopic rod 4 downward, thereby shrinking the spherical shell into an elliptical shell and reducing the volume. Chassis 3 can allow robot to float on the water, and three impeller paddles 11 ha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More