

Vision and inertia combined positioning method
A visual positioning and joint positioning technology, applied in the field of positioning, can solve the problems of uneven positioning output and poor robustness, achieve high precision, improve real-time performance and precision, and reduce the effect of cumulative impact on precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
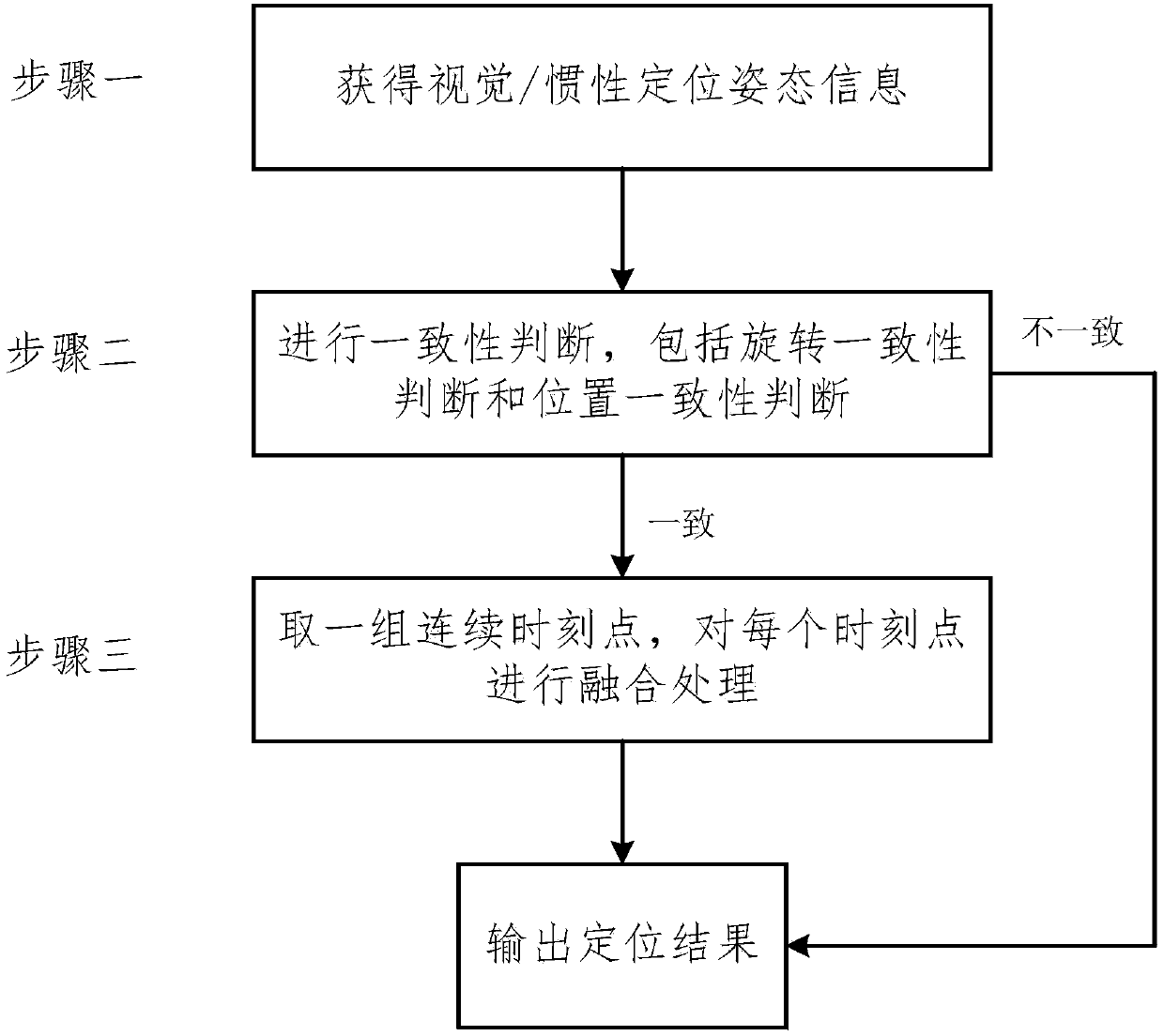
[0040] The joint positioning method mainly uses inertial components to complete the interpolation processing and mutual correction of the visual positioning of the mobile device, so as to obtain high-precision and stable positioning information.
[0041] Visual positioning: collect visual images through imaging equipment, detect changes in different images, and judge motion changes to obtain visual positioning results at a certain moment (taking time k as an example)
[0042] Inertial element positioning: Measure the linear acceleration and rotational angular rate through the inertial measurement element, and calculate the attitude result of the inertial element at a certain moment (taking time k as an example) according to the change of attitude at continuous moments And deduce the predicted positioning results at time k The predicted positioning results Predict the positioning result from the previous moment, that is, k-1 moment and inertial element attitude results ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More