

Automatic cable take-up and pay-off device of nuclear power plant underwater mobile robot
A mobile robot and automatic retractable technology, which is applied in the field of nuclear power testing equipment, can solve problems such as movement obstruction, high labor intensity, and affecting positioning accuracy, and achieve the effects of reducing radioactive dose levels, reducing labor intensity, and streamlining mechanisms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with the embodiment shown in the accompanying drawings, the present invention is described in detail as follows:
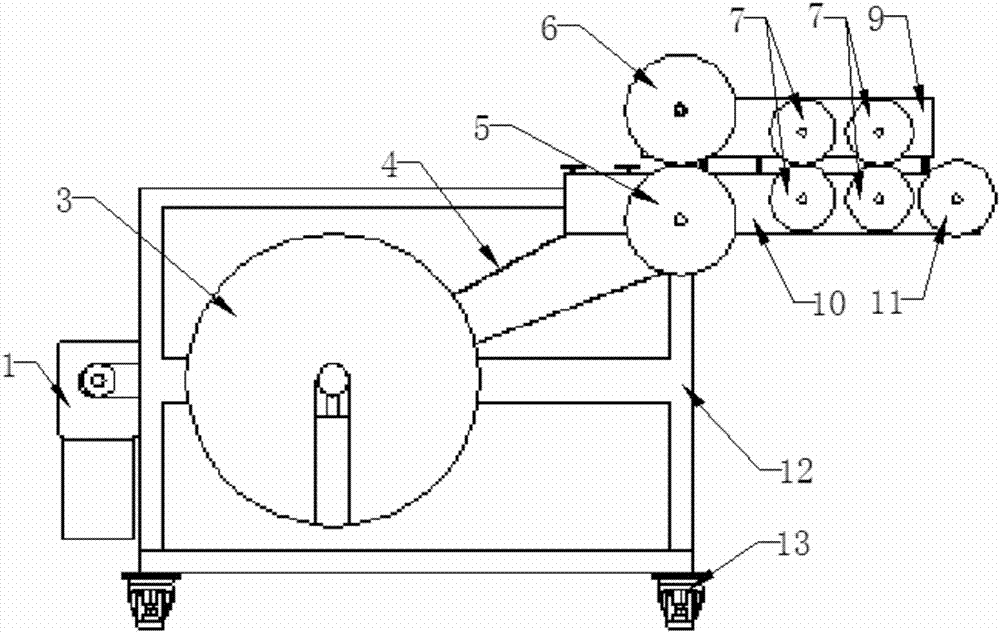
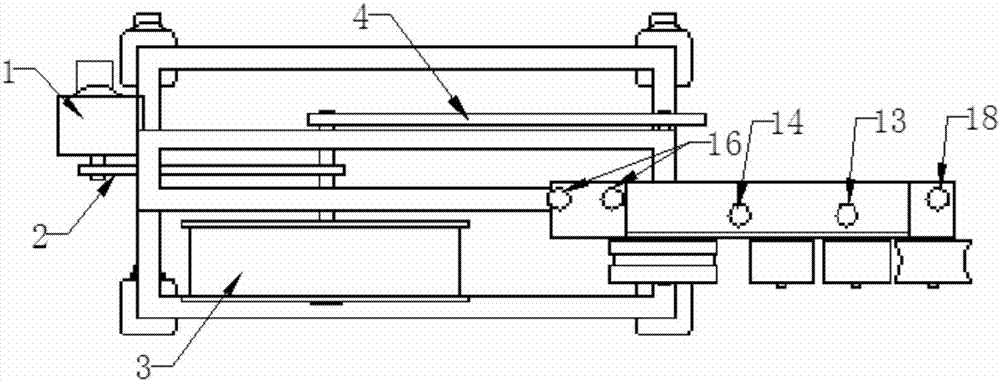
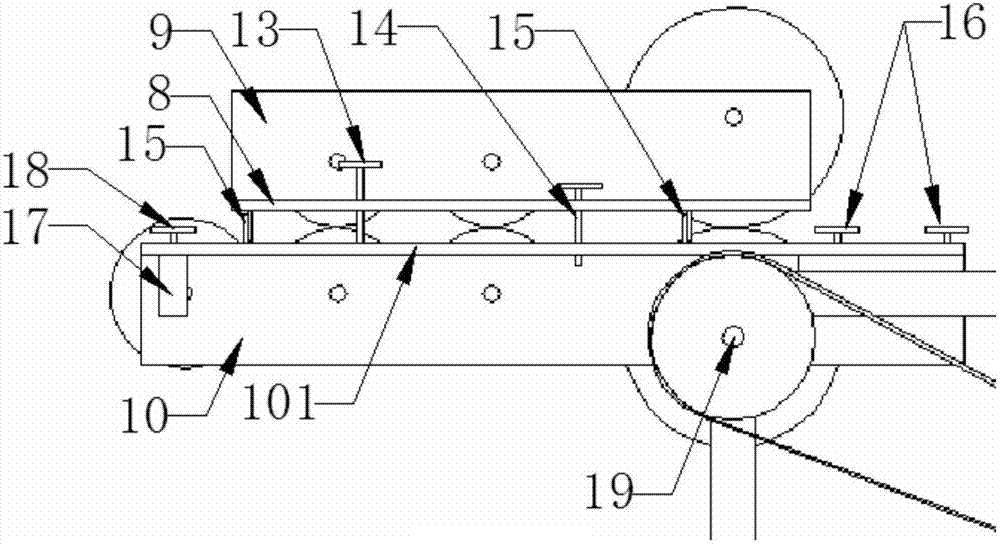
[0020] Such as figure 1 , 2 , 3, 4, and 5, the cable automatic retracting device of the nuclear power plant underwater mobile robot includes a frame 12; the take-up roller 3, cable introduction mechanism, caster 131 and drive mechanism installed on the frame 12 .
[0021] The cable introduction mechanism includes a first rotating shaft 19 rotatably connected to the frame 12, a support plate connected to the first rotating shaft 19, at least one pair of pressing rollers 6 mounted on the support plate , At least one pair of decontamination rollers 7 installed on the support plate and at least one introduction roller 11 installed on the support plate, the peripheral surface of which is concave in an elliptical arc shape. In this embodiment, there is a pair of pinch rollers 6, two pairs of decontamination rollers 7, the axes of the intro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More