

Path planning method for unmanned vehicles based on improved multi-objective particle swarm optimization algorithm
A multi-objective particle swarm and path planning technology, applied in vehicle position/route/height control, motor vehicles, two-dimensional position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
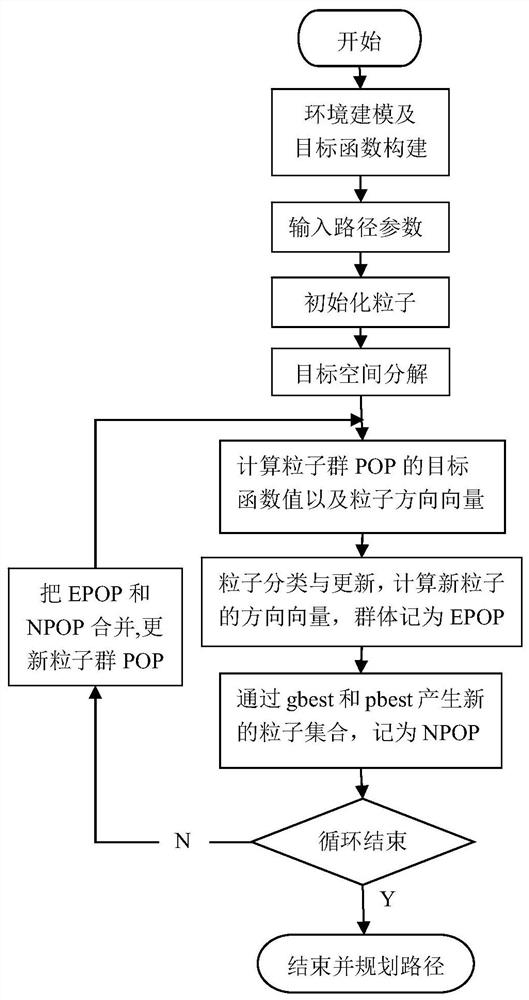
[0043] 1. Introduction to the theoretical basis
[0044] 1. Multi-objective optimization problem
[0045]
[0046] Where x=(x 1 ,x 2 ,...x n ) Is the n-dimensional decision variable, m is the number of objective functions, g(x) is the q inequality constraints of the objective function, h(x) is the p equality constraints of the objective function, all these decision variables satisfy the conditions Expressed by the set Ω, Y={F(x)|x∈Ω} is the target space. Next are four important definitions of multi-objective problems:
[0047] Definition 1. Pareto dominates: Solution d,e∈Ω,d dominates e, denoted as: Meet the following two relations:
[0048]
[0049] Definition 2. Pareto optimal: If x is the Pareto optimal solution, then in Ω, Make Established.
[0050] Definition 3. Pareto optimal solution set (PS): Definition 4. Pareto Frontier (PF): PF={F(x)│xεPS}.
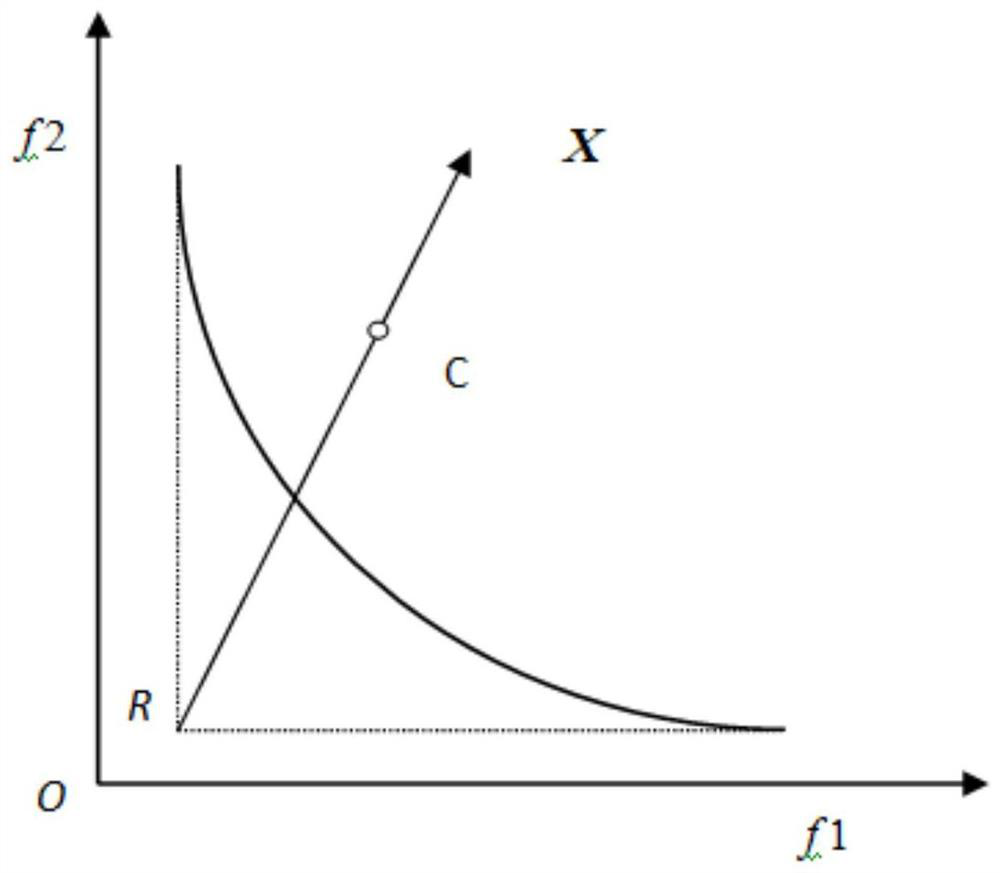
[0051] 2. Direction vector
[0052] Let the reference point be R(r 1 ,...,R m ), where r i =min{f i (x)|x∈Ω}, i=1, 2,...m, where m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More