

Piezoelectric positioning platform coupling inchworm bionics and parasitic motion principle and control method
A parasitic motion, positioning platform technology, applied in piezoelectric effect/electrostrictive or magnetostrictive motors, electrical components, generators/motors, etc., can solve the problem of poor self-locking, complex structure and control of piezoelectric positioning platforms , the use of piezoelectric elements and other problems, to achieve the effect of simple structure and control, small retraction movement, and high bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
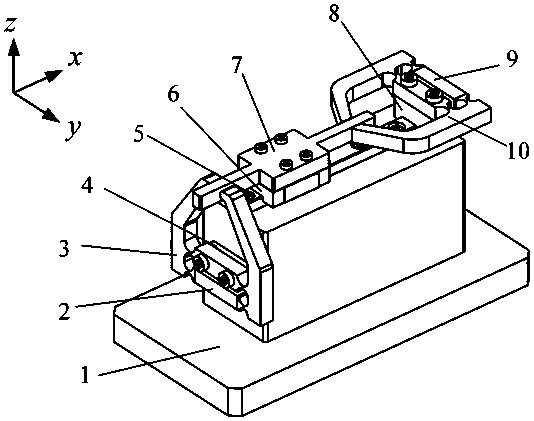
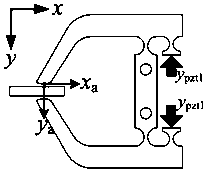
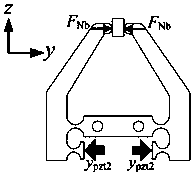
[0026] see Figure 1 to Figure 6 As shown, the piezoelectric positioning platform and control method of the present invention coupling the principle of bionic and parasitic motion of inchworms, the positioning platform mainly includes a clamp unit, a mover unit and a drive unit, etc., and the drive unit, mover unit and clamp unit are respectively passed through Screws are connected to the base, and the lamellar structures on both sides of the mover in the mover unit are respectively in clearance fit with the grooves at the output ends of the drive unit and the clamp unit. The control method is as follows: respectively applying periodic square wave and sawtooth wave driving voltages with a certain time sequence to the piezoelectric stack in the clamping unit and the driving unit to realize the stepping motion of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More