

Long-term fixed point profile measuring method for autonomous underwater vehicle
A technology for underwater robot and profile measurement, which is applied in the direction of measuring devices, underwater ships, underwater operating equipment, etc., to achieve the effects of reducing average power consumption, high adjustment accuracy, and consistent two-way adjustment speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described in further detail below in conjunction with the accompanying drawings.
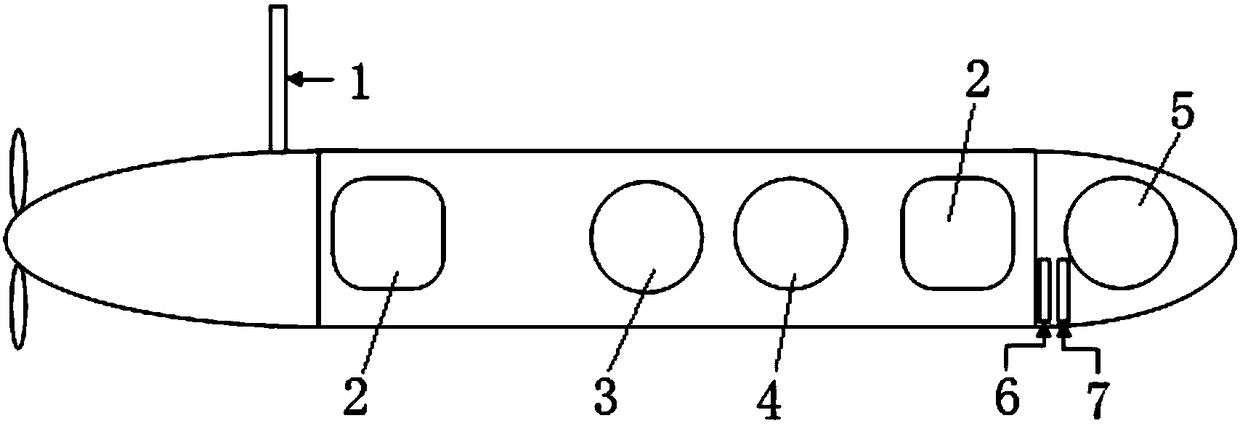
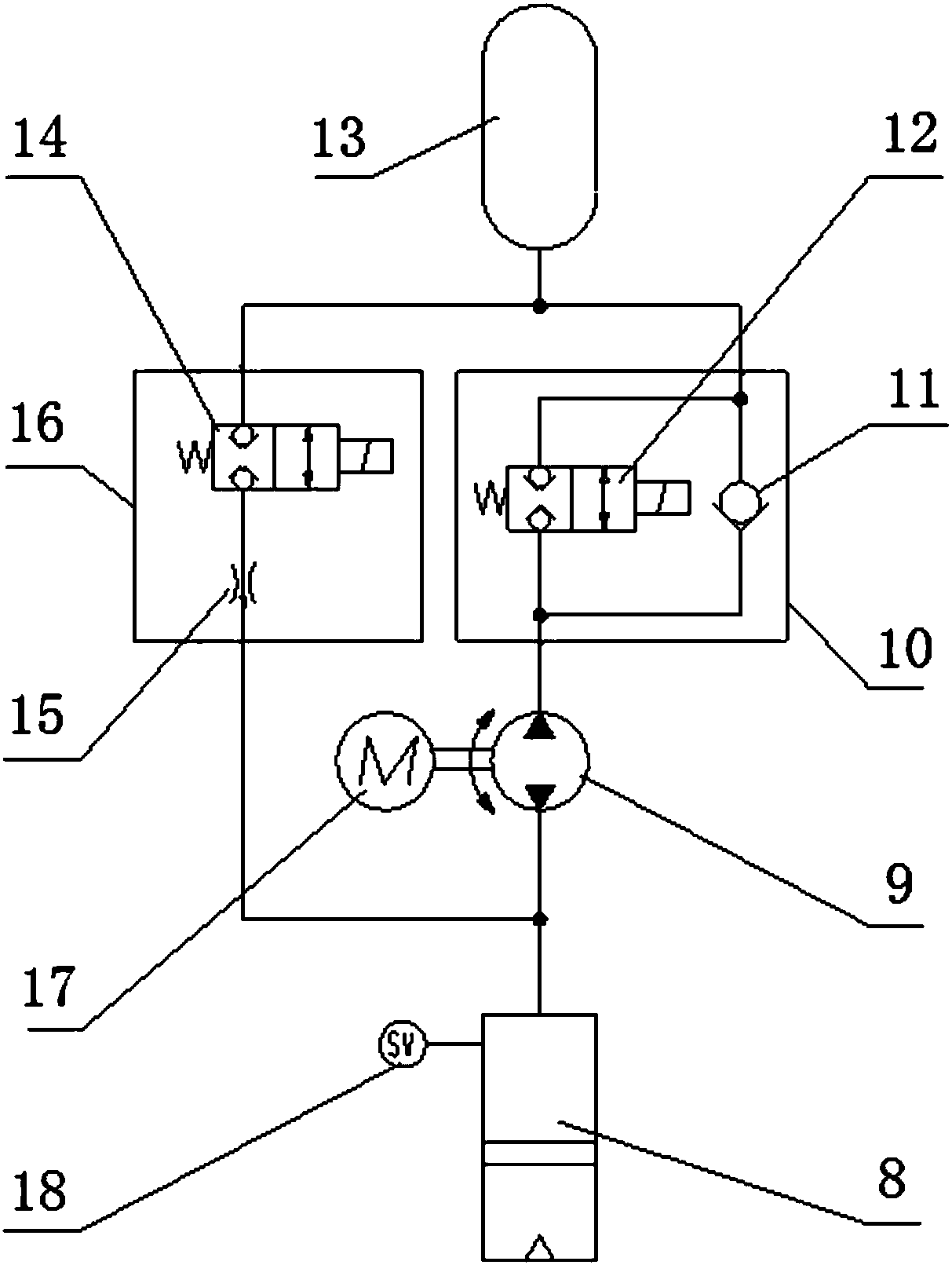
[0034] like Figure 1~2 As shown, the present invention includes the following equipment: GPS antenna 1, buoyancy adjustment device 2, navigation equipment 3, main controller 4, detection load 5, depth gauge 6 and altimeter 7 arranged on the underwater robot. Wherein the navigation device 3 is used for navigation of the autonomous underwater robot to the target area, and navigation when departing from the target area and returning to the voyage, the navigation device 3 is provided with an attitude sensor; the GPS antenna 1 is used for the autonomous underwater robot on the water surface Receive GPS signal, carry out position calibration; Described depth meter 6 is used for measuring the water depth where autonomous underwater robot is; Described altimeter 7 is used for measuring autonomous underwater robot apart from seabed height; Parameter water quality me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More