

Manipulator gripper
A robot gripper and connecting rod technology, applied in the field of robots, can solve the problems of grasping failure, insufficient limit, narrow application range, etc., and achieve the effect of compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
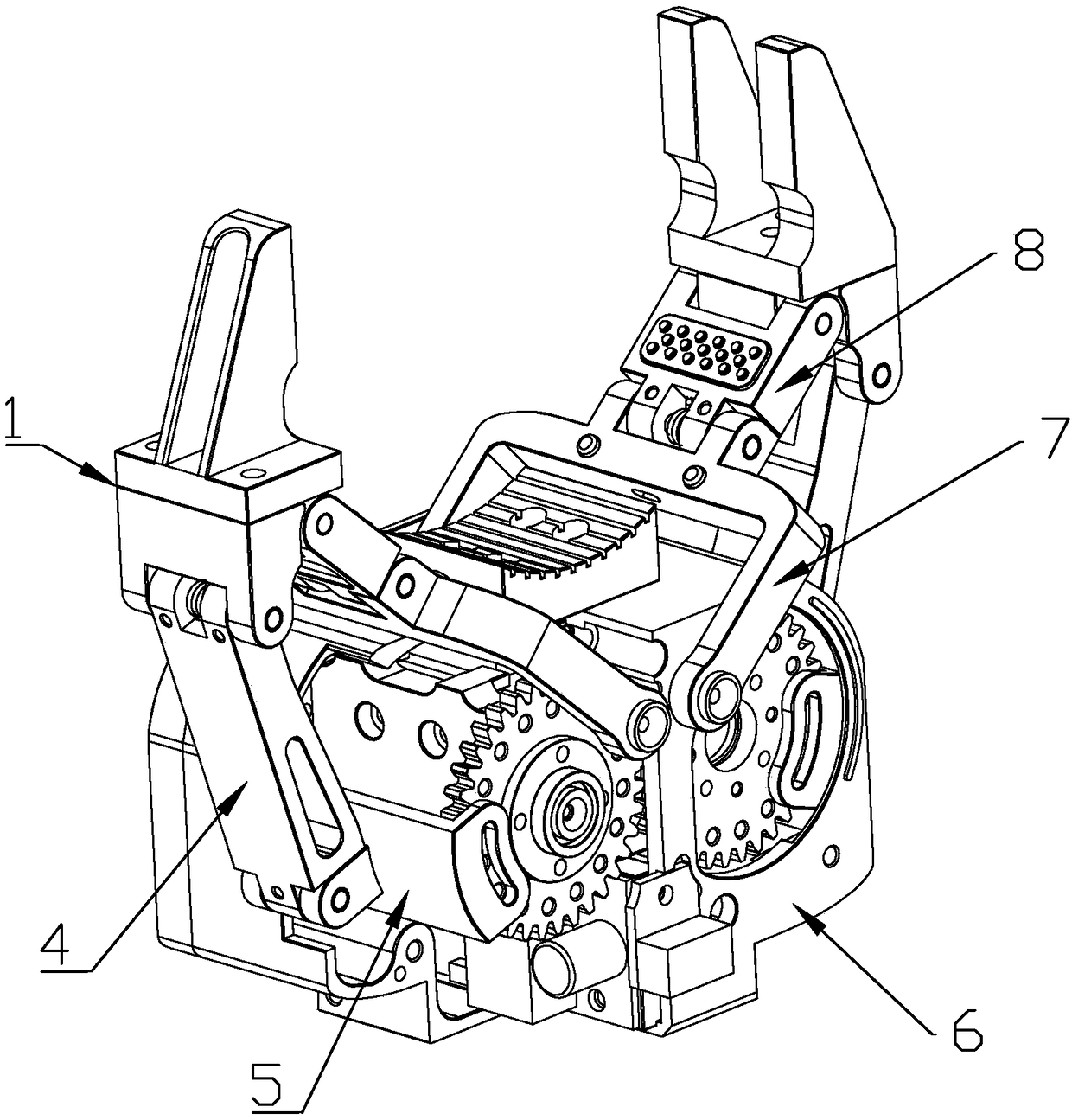
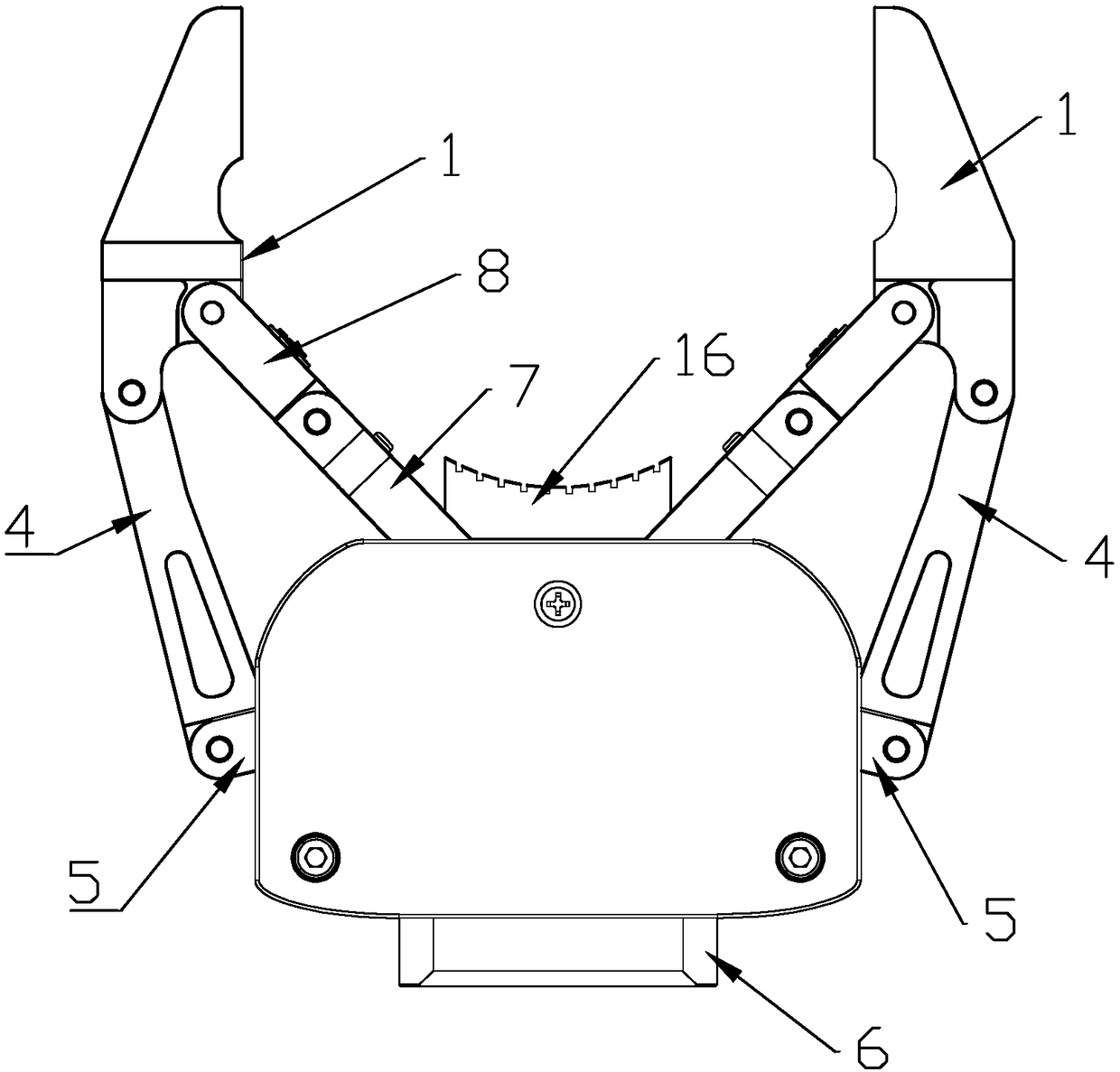
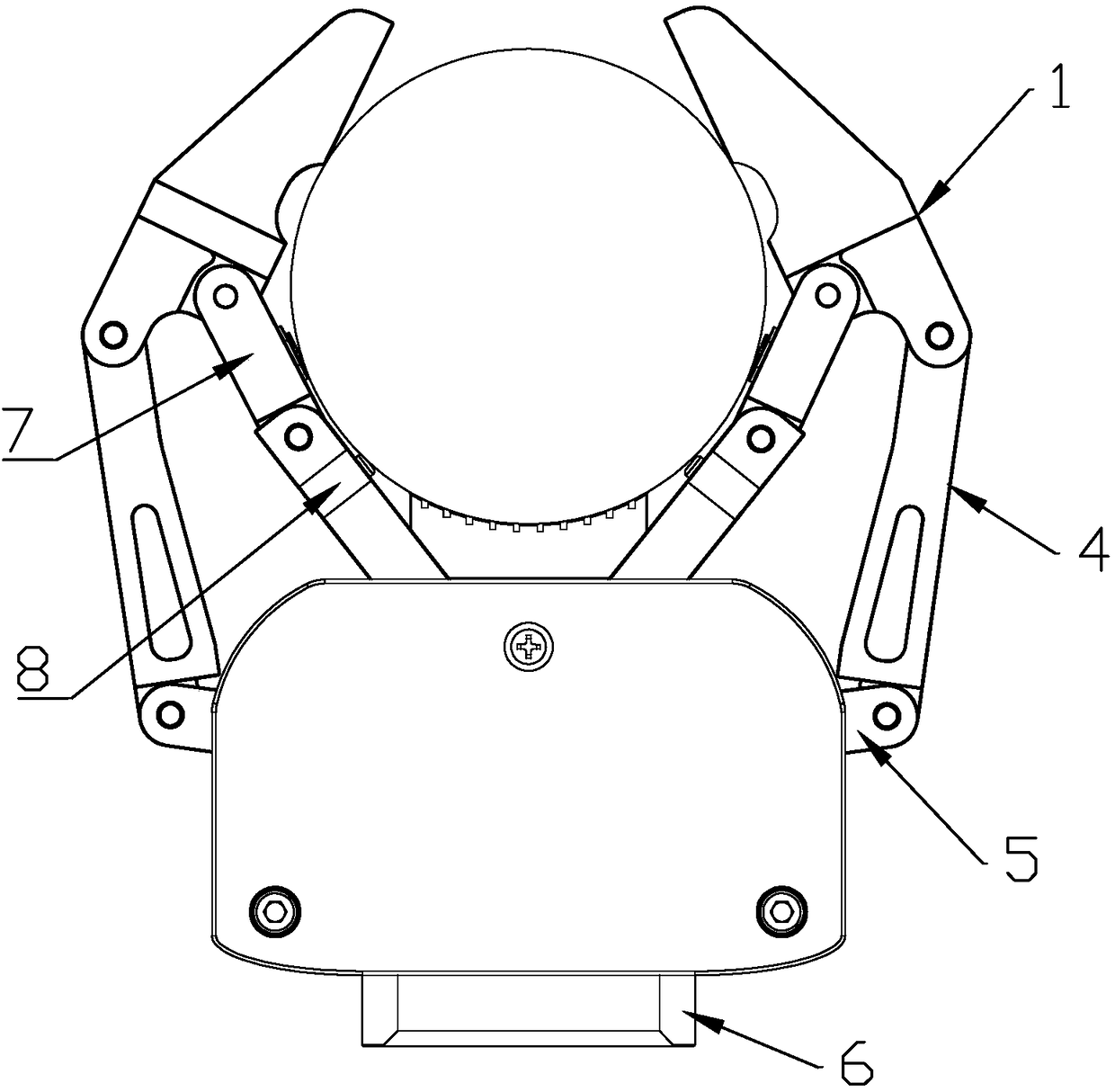
[0021] Combine below Figure 1 to Figure 6 The present invention is further described.
[0022] The robot gripper includes a mounting frame 6 and two clamping units, the clamping units are symmetrically arranged, the mounting frame 6 is arranged with a driving device, and the clamping unit includes a clamping structure 1, and the clamping structure A driven link assembly hinged in the middle of 1 and an active link assembly hinged at the end of the clamping structure 1 . The other end of the driven link assembly is hinged to the mounting frame 6, and the other end of the active link assembly is arranged at the output end of the driving device.
[0023] The driven link assembly includes a seventh connecting rod 7 hinged to the mounting frame 6 and an eighth connecting rod 8 hinged to the clamping structure 1, the seventh connecting rod 7 and the eighth connecting rod 8 hinged between. The active link assembly includes an active member 5 connected to the output end of the dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More