

Control method and device of domain controller used for automatic driving
A domain controller, autonomous driving technology, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system and other directions, which can solve the problems of poor occupant comfort, large amount of calculation, and occupant danger.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
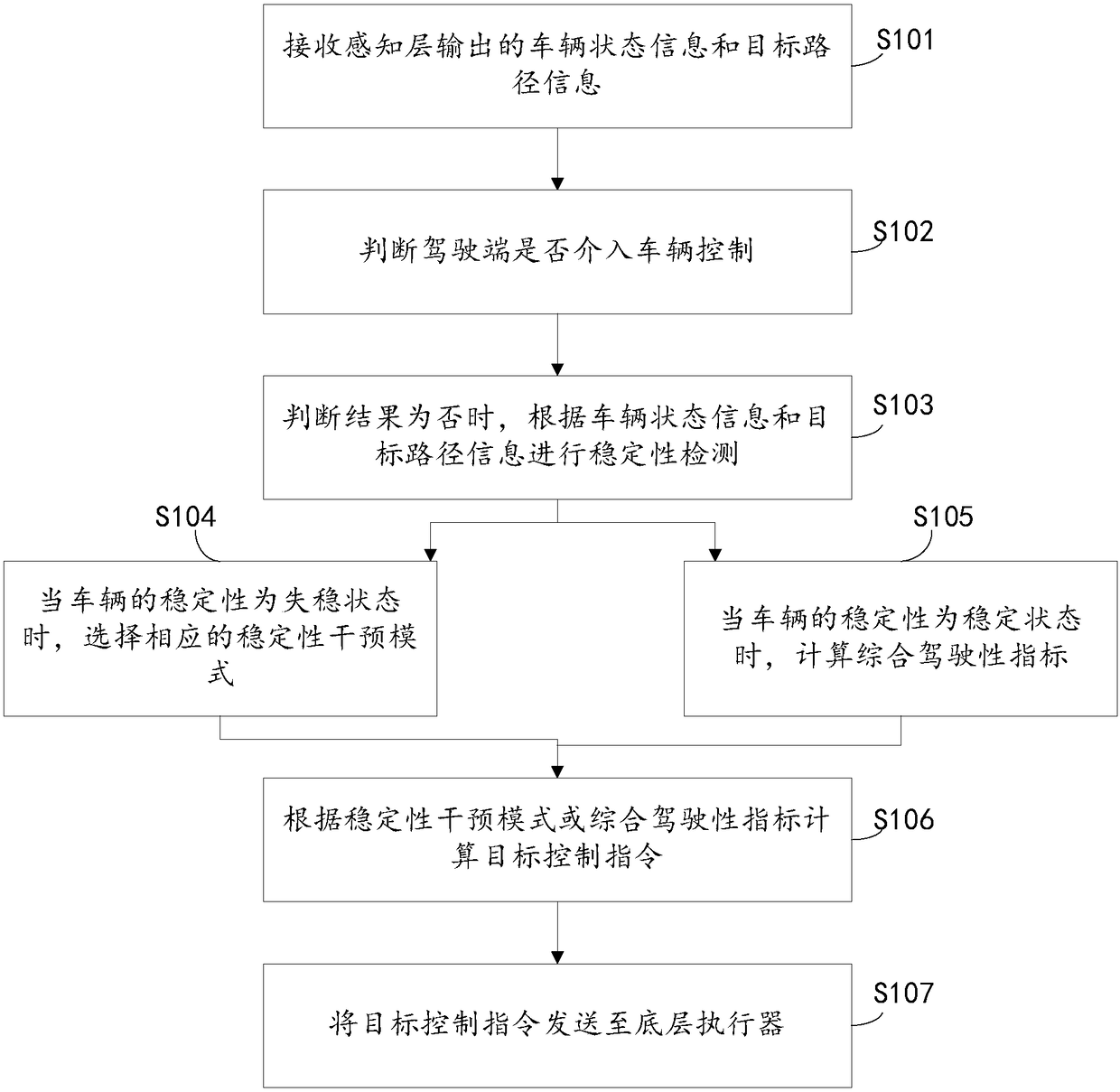
[0065] see figure 1 The method for controlling a domain controller for automatic driving proposed in this embodiment specifically includes the following steps:
[0066] Step S101: Receive the vehicle status information and target path information output by the perception layer. What needs to be explained here is that the hardware based on the domain controller can be dSPACE MicroAutoBox, NI PXI, single-chip microcomputer and other platforms that can perform program programming and real-time calculation of the program . The domain controller is implemented based on programming languages such as Simulink, and has a complete definition of input and output interfaces, that is, the domain controller receives the state parameters of the perception layer through the input and output interfaces. Usually, the domain controller receives the state parameters through the CAN bus. In addition, it should be noted that the state parameters that can be received by the domain controller als...
Embodiment 2
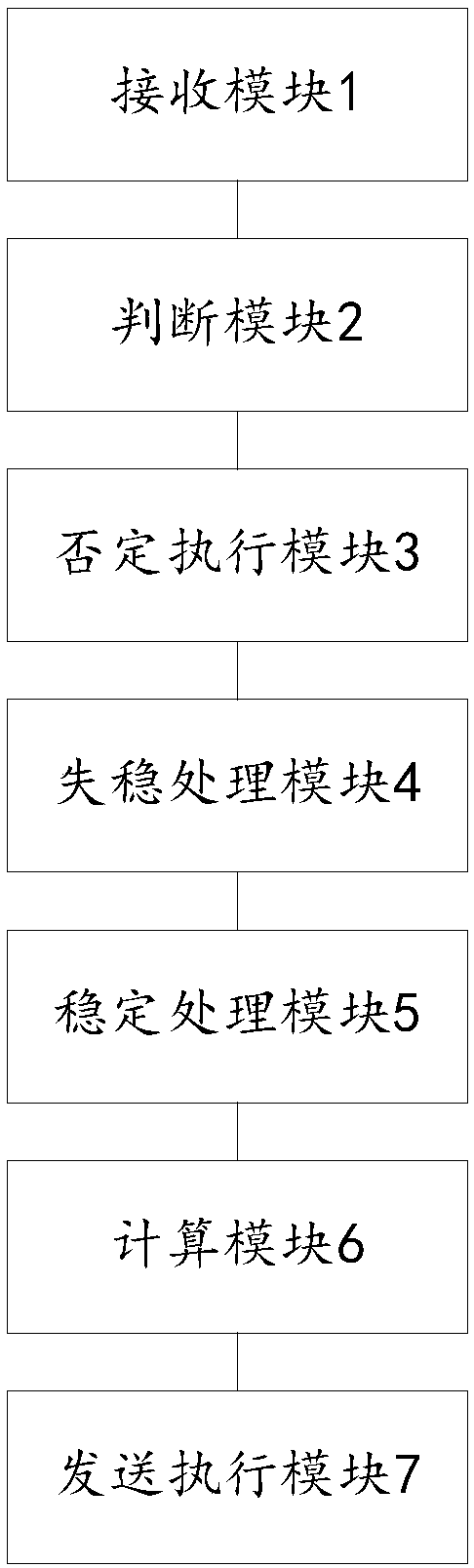
[0095] see figure 2 , image 3 and Figure 4, the present embodiment provides a control device for a domain controller for automatic driving, including: a receiving module 1, configured to receive vehicle state information and target path information output by the perception layer, and a judging module 2, configured to judge whether the driving terminal intervenes in the vehicle Control, negative execution module 3, used to perform stability detection according to the vehicle state information and target path information when the judgment result is negative, and the instability processing module 4, used to select the corresponding The stability intervention mode, the stability processing module 5, is used to calculate the comprehensive drivability index when the stability of the vehicle is in a stable state, and the calculation module 6 is used to calculate the target control command according to the stability intervention mode or the comprehensive drivability index, and sen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More