

Obstacle-crossing wall-climbing robot and obstacle-crossing method thereof
A wall-climbing robot and wall-surface technology, applied in the field of wall-climbing robots, can solve problems such as the inability to meet the requirements of continuous motion stability and attitude of complex trajectories, the limited application range of wall-climbing robots, and the lack of high-load operation capability, etc. Obstacle crossing ability, wide application space, good stability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, wherein, for the explanation and description of the orientation, refer to the accompanying drawings of the present invention.
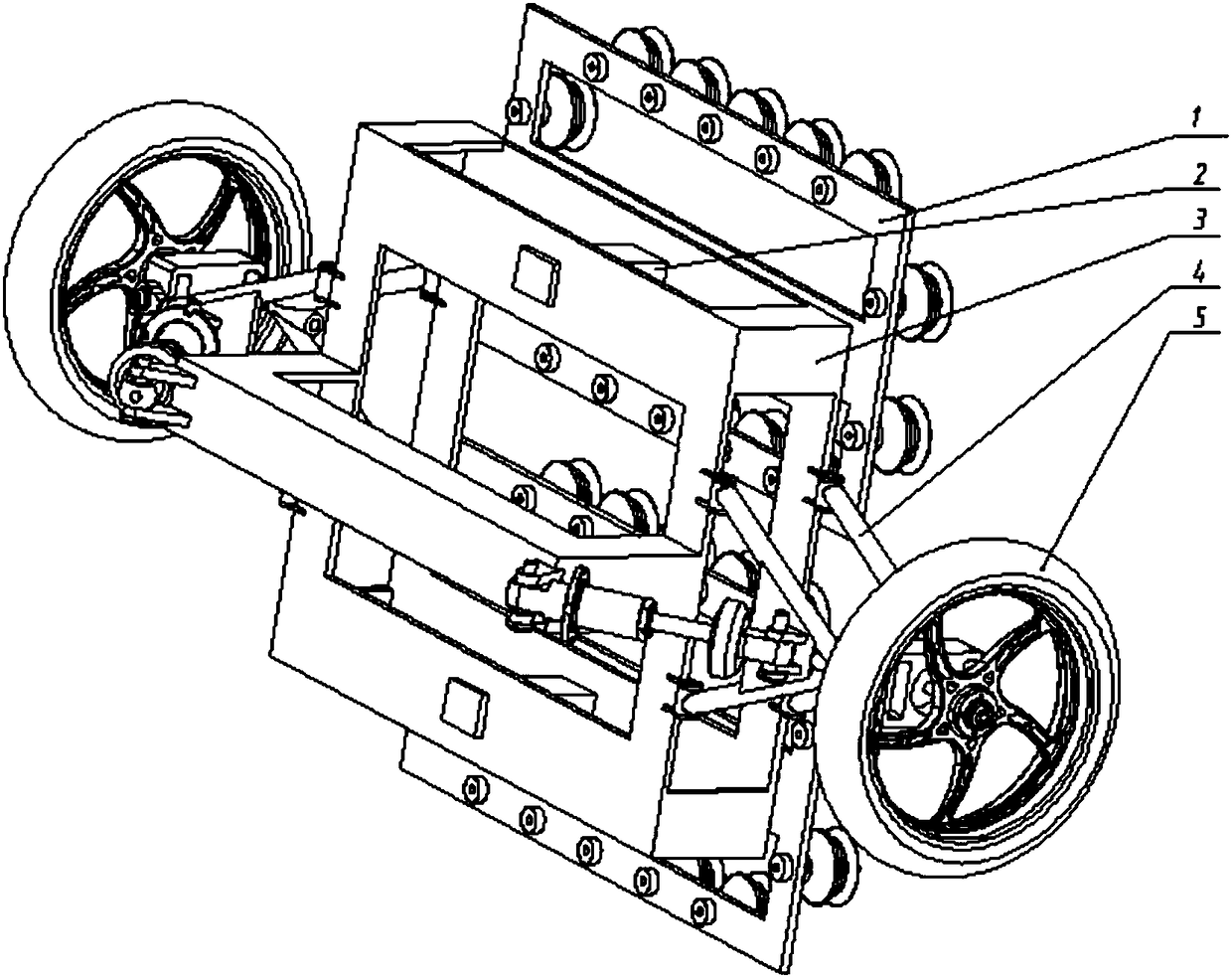
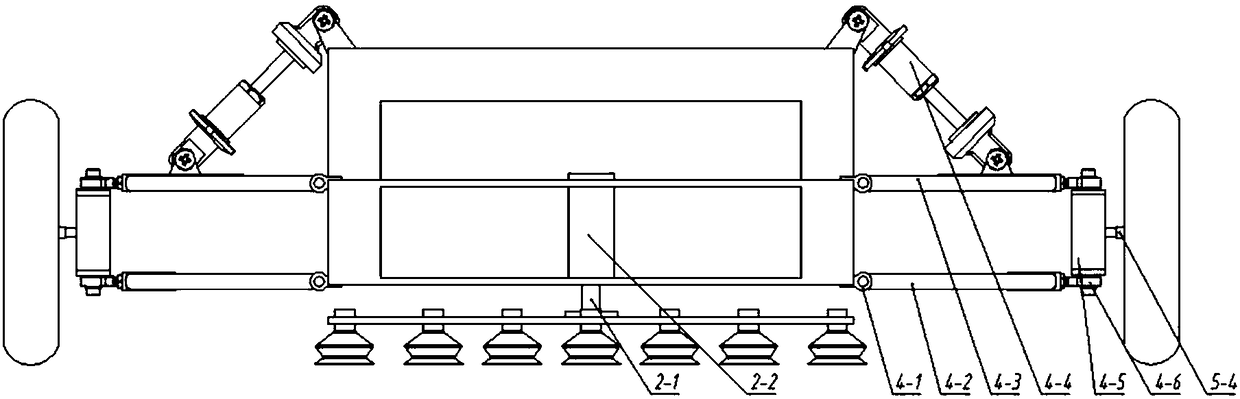
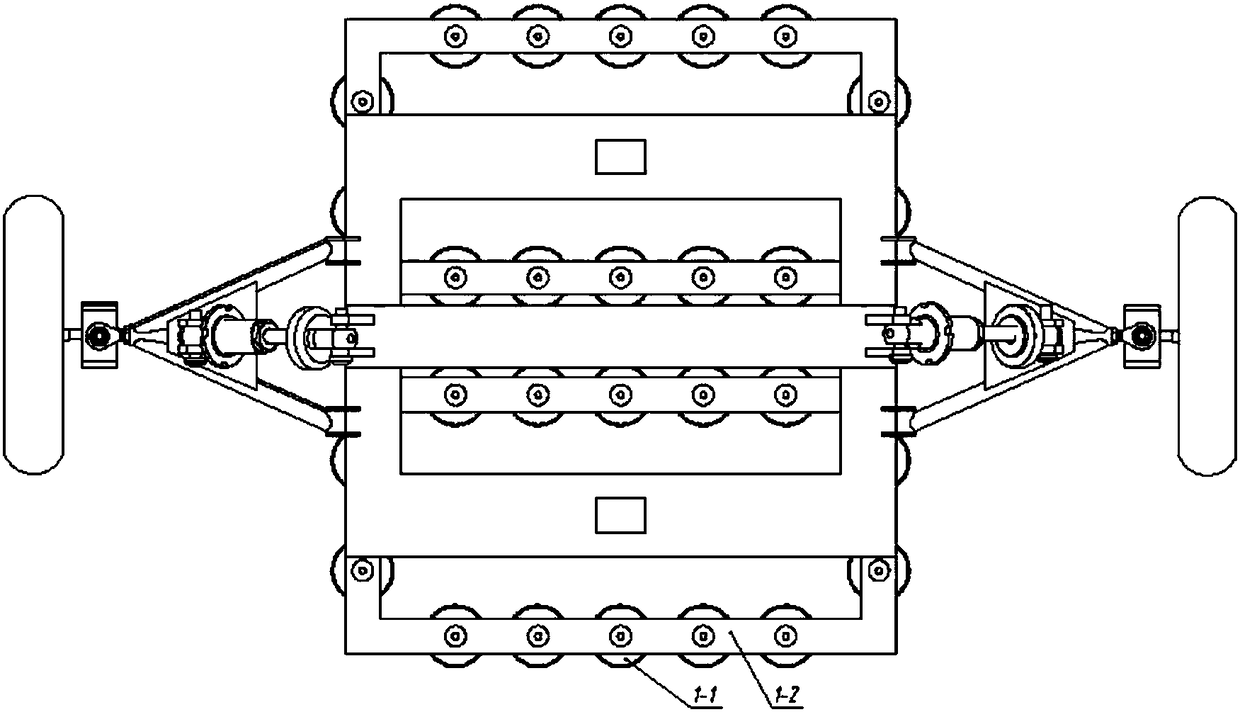
[0067] refer to Figure 1 to Figure 4 , a wall-climbing robot capable of surmounting obstacles of the present invention comprises two groups of adsorption mechanisms 1, two groups of vertical motion mechanisms 2, two groups of suspension mechanisms 4, two groups of walking wheels 5 and a body bracket 3, the adsorption mechanism 1 Connect the vertical motion mechanism 2, the vertical motion mechanism 2 is connected to the body support 3, the body support 3 is connected to the suspension mechanism 4, and the suspension mechanism 4 is connected to the road wheel 5. The body bracket 3 is responsible for supporting the vertical motion mechanism 2 and the suspension mechanism 4 . Two groups of adsorption mechanisms ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More