

Robot multi-dimension response interaction method and device
An interaction method and robot technology, applied in the field of multi-dimensional response interaction methods and devices for robots, can solve the problems of low response and low flexibility, and achieve the effect of high initiative and increased anthropomorphism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
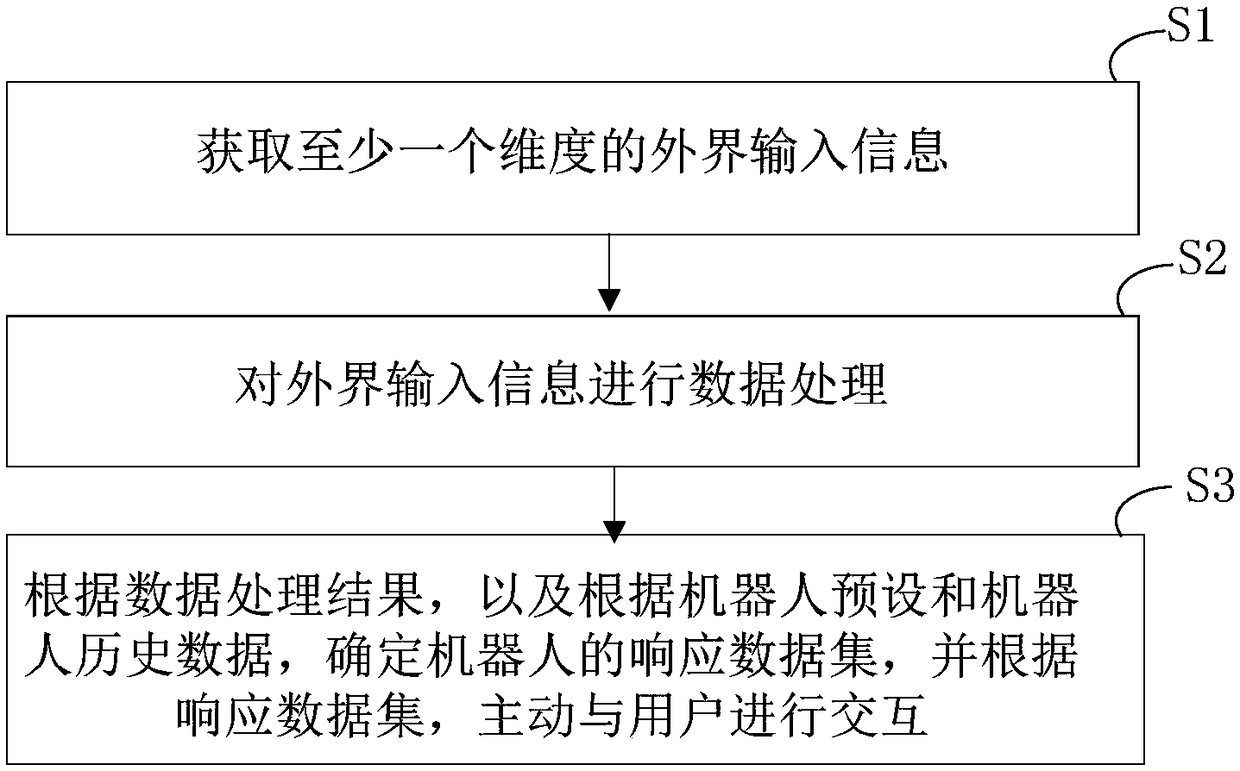
[0035] combine figure 1 The robot multi-dimensional response interaction method provided in this embodiment includes:
[0036] Step S1, obtaining external input information of at least one dimension;
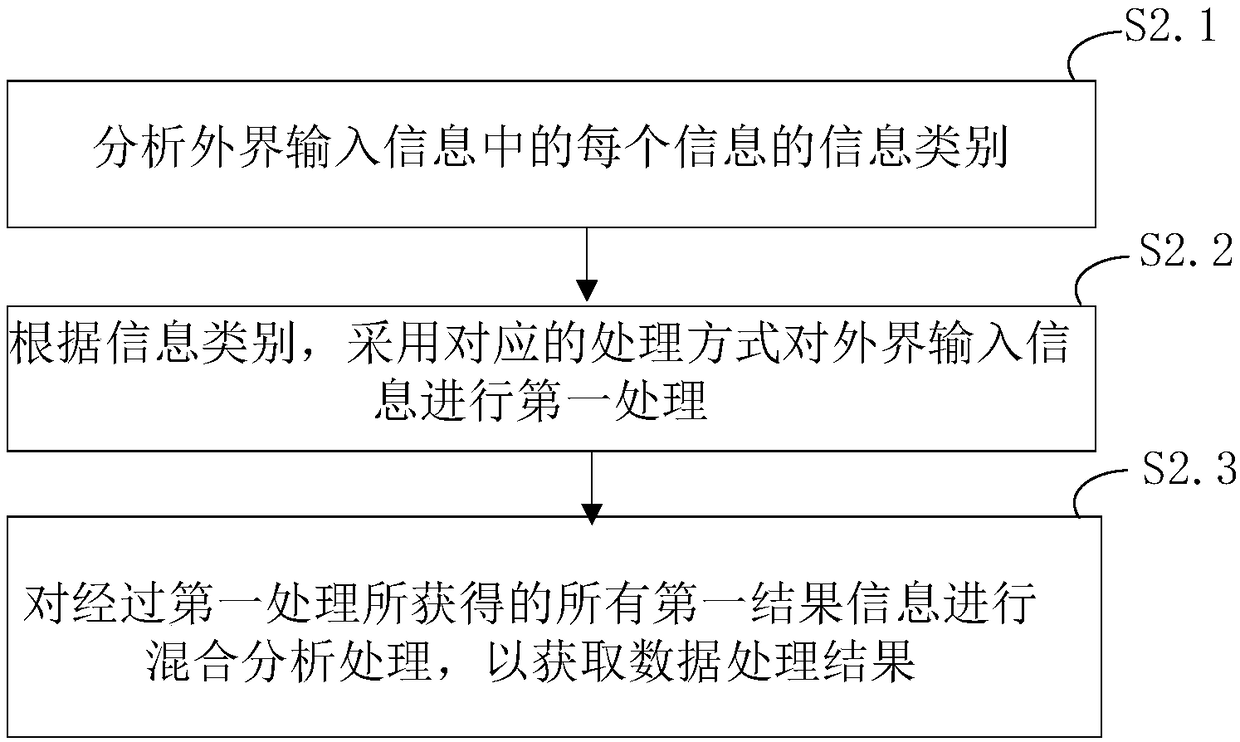
[0037] Step S2, performing data processing on external input information;
[0038] Step S3, according to the result of data processing, as well as according to the preset of the robot and the historical data of the robot, determine the response data set of the robot, and actively interact with the user according to the response data set.
[0039] The robot multi-dimensional response interaction method provided by the embodiment of the present invention can not only respond to the input of the user, but also actively interact with the user in combination with changes in the external environment, which has higher initiative and increases the anthropomorphic nature of the robot.
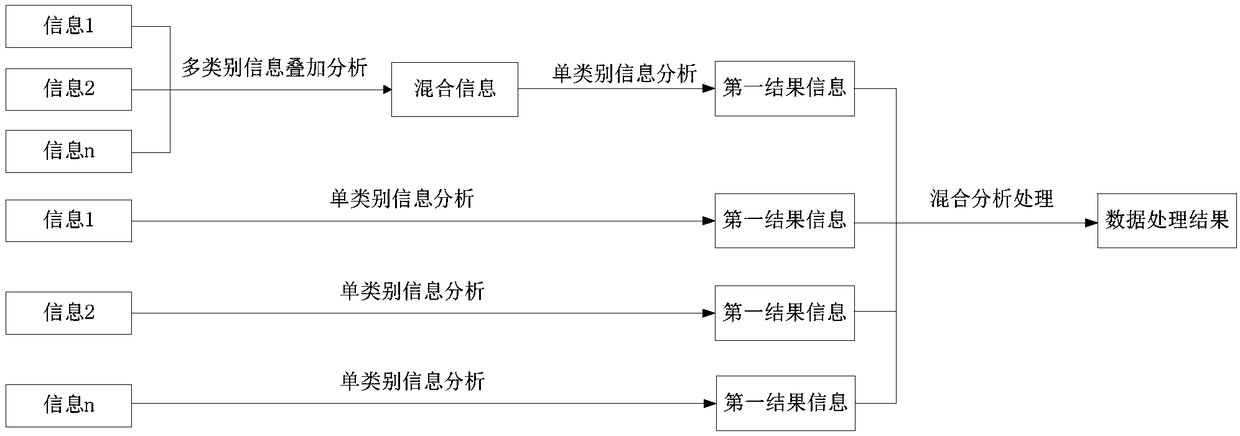
[0040] It should be noted that, in this embodiment, after the data processing results are obtained, ...
Embodiment 2
[0061] to combine Figure 4 , the robot multi-dimensional response interaction device provided by the embodiment of the present invention includes:
[0062] An information acquisition unit 1, configured to acquire external input information in at least one dimension;
[0063] A data processing unit 2, configured to perform data processing on external input information;
[0064] The interaction unit 3 is configured to determine the response data set of the robot according to the data processing result, as well as the robot preset and the robot historical data, and actively interact with the user according to the response data set.
[0065] The robot multi-dimensional response interaction device provided by the embodiment of the present invention can not only respond to the user's input, but also actively interact with the user in combination with changes in the external environment, which has higher initiative and increases the anthropomorphic nature of the robot.
[0066] It...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More