

LSTM neural network AEB system control method based on driver data
A control method and neural network technology, applied in the field of LSTM neural network AEB system control based on driver data, can solve problems such as gradient explosion, parameter capture has short-term dependence, error increase, etc., and achieve the goal of improving anthropomorphism and comfort Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with specific examples and accompanying drawings.
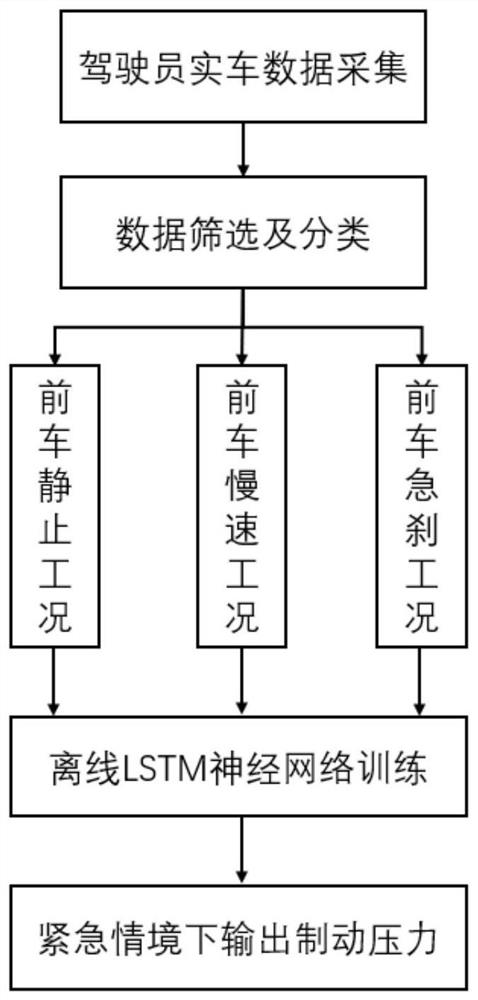
[0028] The present invention provides a kind of LSTM neural network AEB system control method based on driver data, such as figure 1 As shown, the method includes the following steps:
[0029] S1. Obtain and classify the data of the driver during emergency braking during real vehicle driving. The data includes environmental data and the output data of the driver of the own vehicle, and classify the data according to the static, slow speed and emergency braking of the preceding vehicle. Classify working conditions.
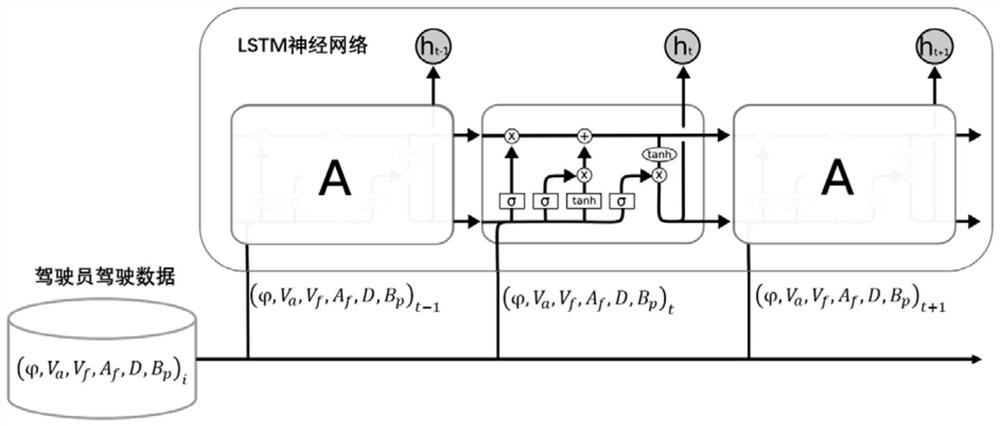
[0030] The environmental data include the longitudinal velocity of the own vehicle, the longitudinal velocity and longitudinal acceleration of the preceding vehicle, the road surface adhesion coefficient, and the relative distance between the preceding vehicle and the own vehicle. The ego driver output data includes braking time and brak...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More