

Multifunctional flexible grabbing mechanism
A grasping mechanism, multi-functional technology, applied in the field of intelligent robots, can solve problems such as function, flexibility, and cost that do not meet engineering requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
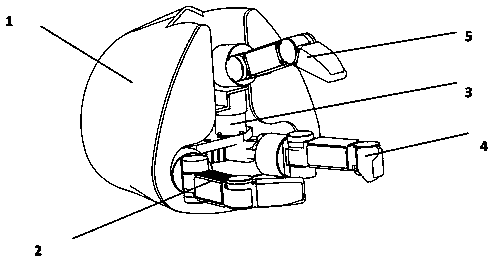
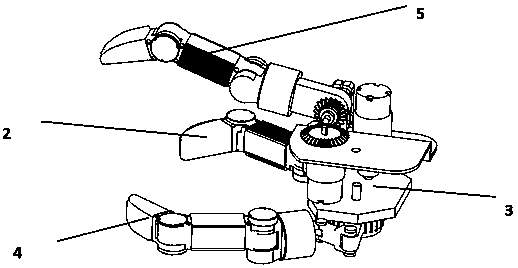
[0023] Embodiment 1: as Figure 1-7 As shown, a multi-functional flexible grasping mechanism includes: hand shell 1, lower side fingers 2. Internal drive transmission 3. Lower fingers 4. The upper finger 5, the shell 1 is installed on the internal drive transmission device 3, the lower finger 2 and lower fingers 4 are respectively installed on both sides of the lower part of the internal drive transmission device 3, and the upper side fingers 5 are installed on the upper side of the internal drive transmission device 3,
[0024] The internal driving device 3 includes: a shaft seat 12. Shaft seat 13. Bevel gear shaft 14, small bevel gear 15, upper support plate 16, large bevel gear 17, deceleration DC motor 18. Deceleration DC motor 19. Coupling 20. Rocker 21, pin 22, connecting rod 23. Spur gear 24. Gear shaft 25, lower support plate 26, spur gear 27. Gear shaft 28. Connecting rod 29. Joystick 30. Shaft seat 12 and shaft seat 13 are all instal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More