Driving task deciding system and method for driverless car
A self-driving car and decision-making system technology, applied in the field of driverless car driving task decision-making system, can solve problems such as lack of systematic description, and achieve good safety results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The standard parts used in the present invention can be purchased from the market, and the special-shaped parts can be customized according to the instructions and the accompanying drawings. The specific connection methods of each part adopt mature bolts, rivets, welding in the prior art , pasting and other conventional means, no longer described in detail here.
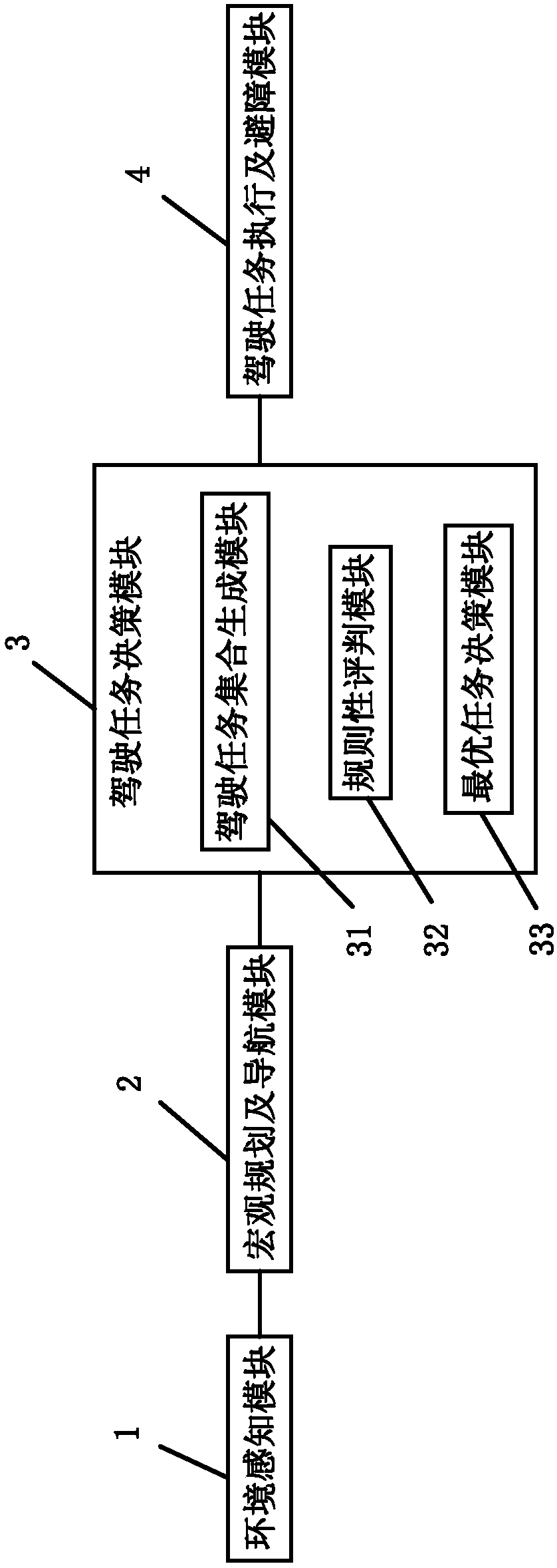
[0056] like figure 1 As shown, the present invention includes an environment perception module, a macro planning and navigation module, a driving task decision module, a driving task execution and obstacle avoidance module. During runtime, each module runs periodically under its own runtime cycle, and the runtime steps are as follows:
[0057] Step 1, the driving task of the input vehicle includes the starting point and the ending point.
[0058] Step 2, the macro planning and navigation module performs macro path planning according to the input starting point and end point, and outputs the navigation inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More