

Inner-gear-type non-cooperative target locking mechanism
A technology of non-cooperative target and locking mechanism, which is applied in the field of locking mechanism and internal gear type non-cooperative target locking mechanism, which can solve problems such as poor connection stiffness, target escape, difficulty in ensuring target stability and attitude accuracy, etc. , to achieve the effect of ensuring stability and preventing escape
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
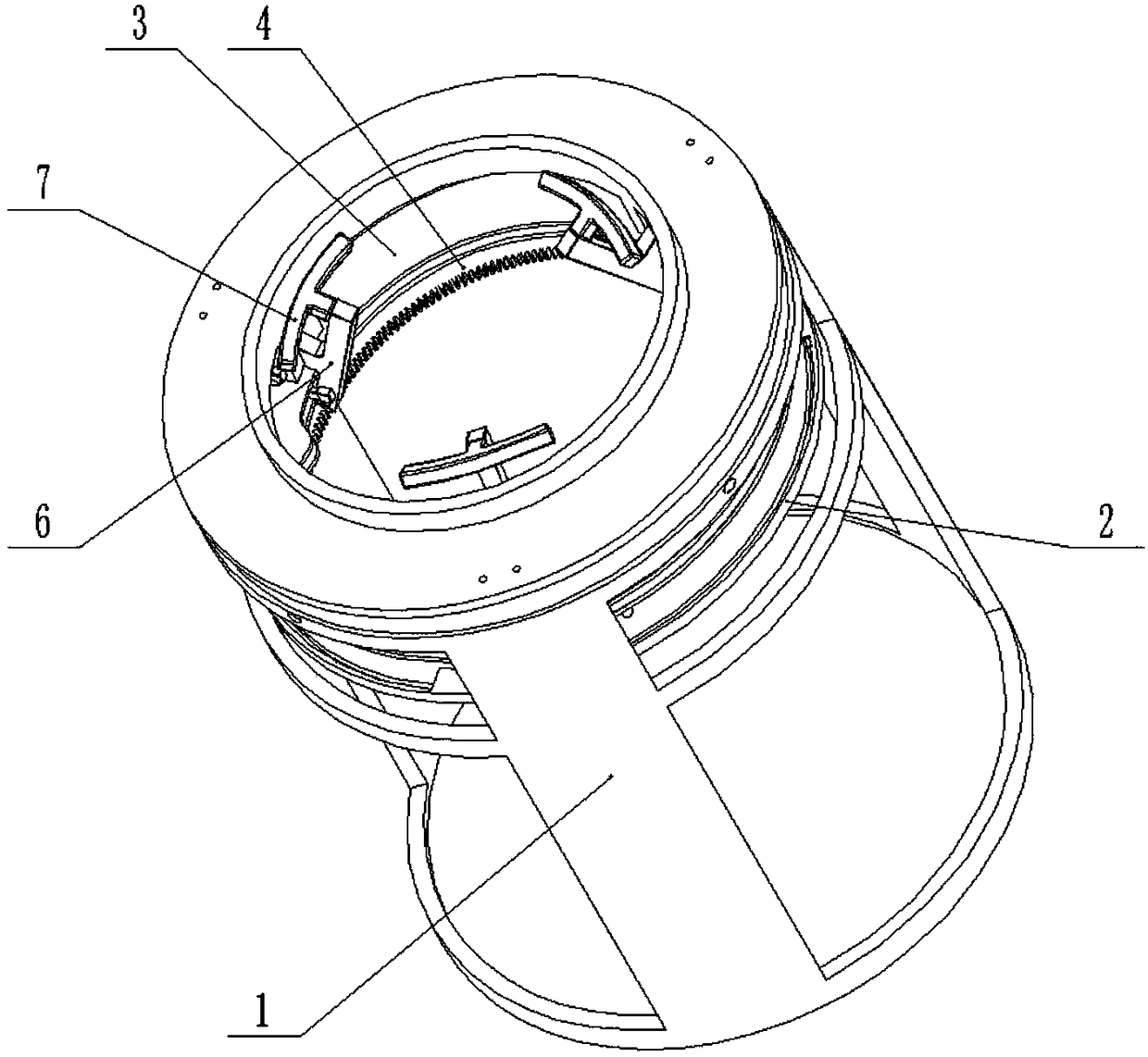
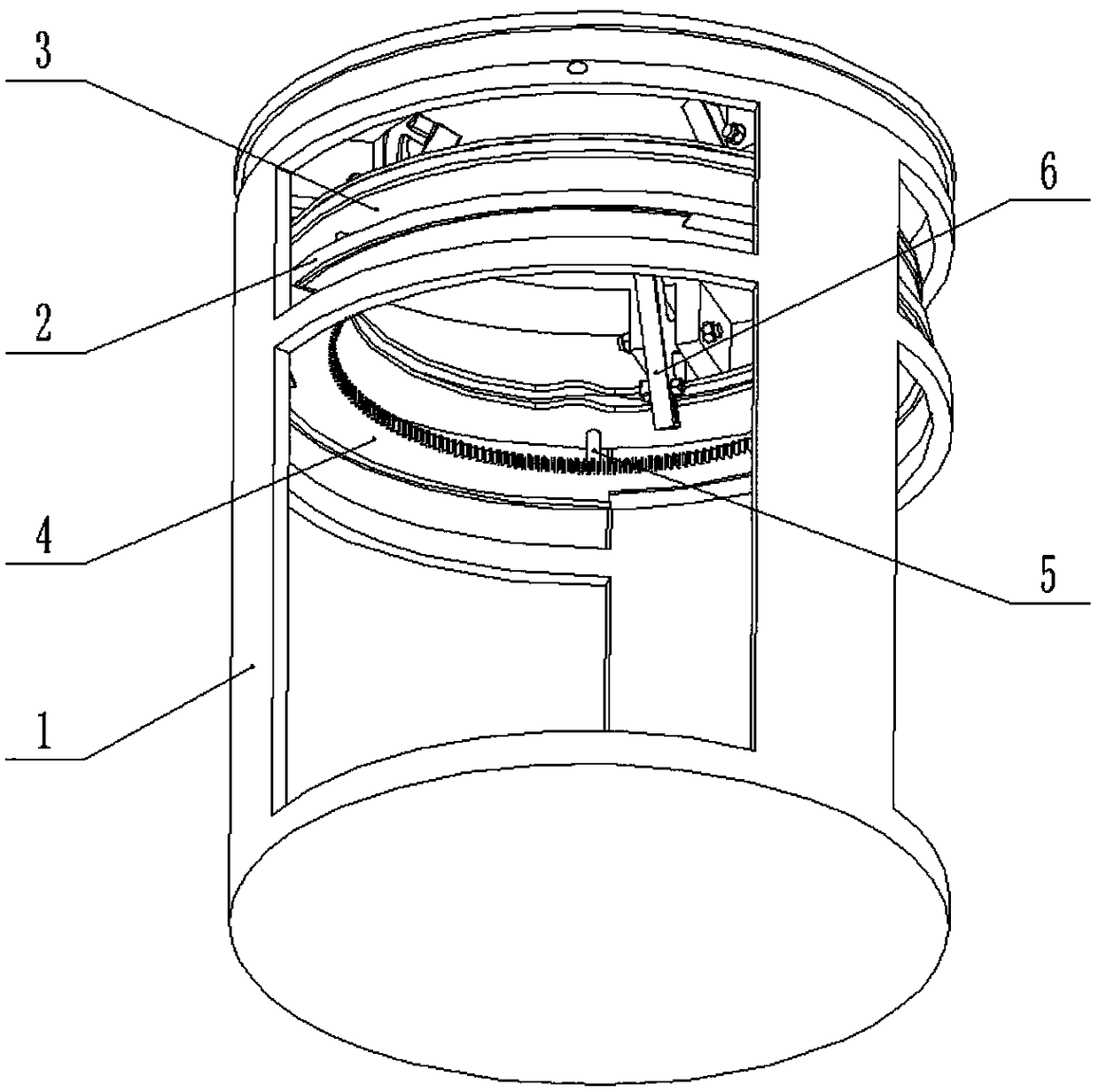
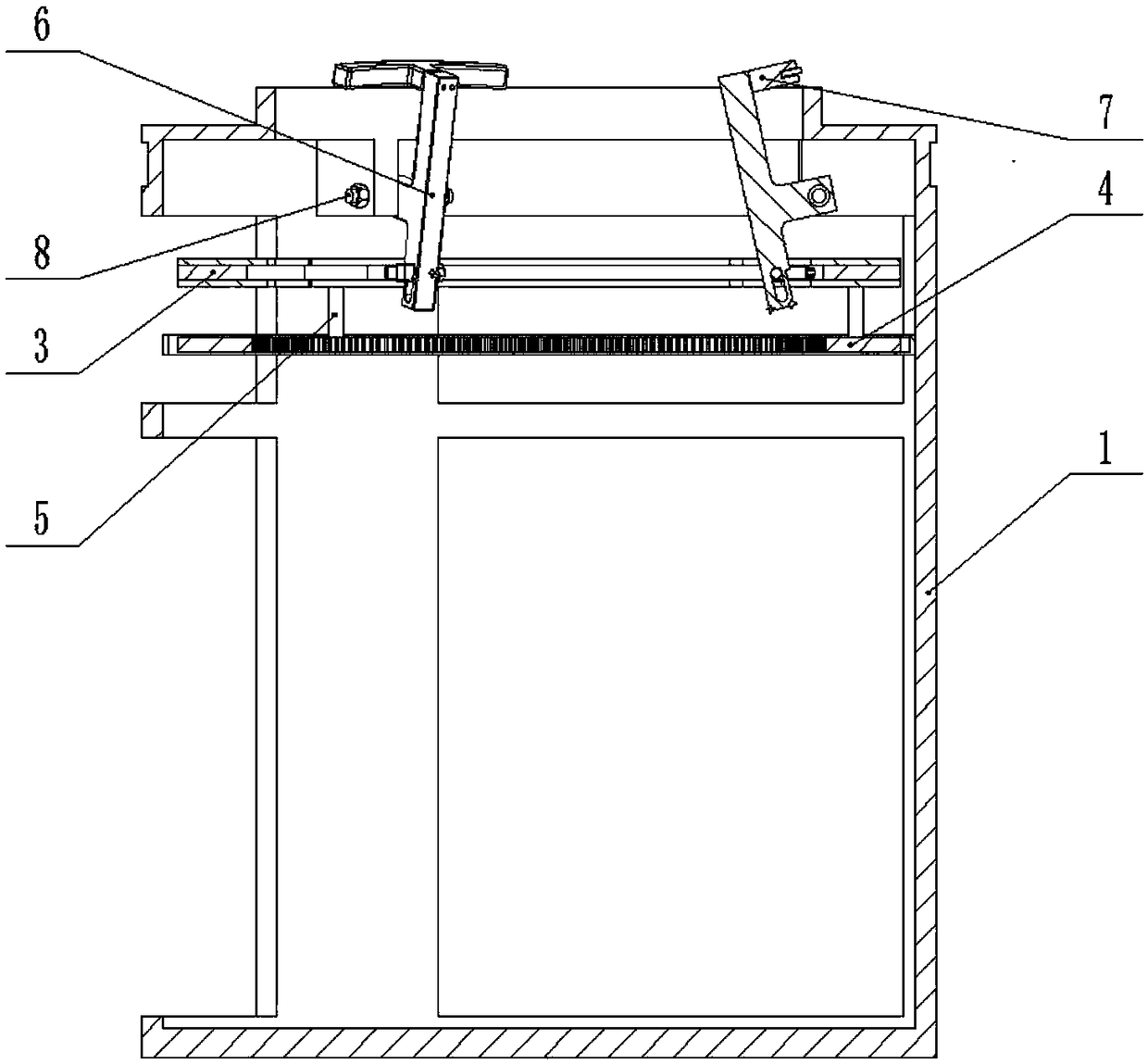
[0030] Combine below Figure 1-13 Describe this embodiment, an internal gear type non-cooperative target locking mechanism, including a support housing 1, a bearing bush 2, a ring assembly 3, an inner ring gear 4, a connecting column 5, a locking link 6, a pressure block 7, Connect the screw rod 8 and the torsion spring, the bearing bush 2 is fixedly connected to the middle and upper end of the inner wall of the supporting shell 1, the inner ring gear 4 is rotatably connected in the bearing bush 2, and the upper end of the inner ring gear 4 passes through a plurality of connecting columns 5 The ring assembly 3 is fixedly connected, and the upper end inside the supporting shell 1 is fixedly connected with multiple sets of lugs 1-1, each set of lugs 1-1 is hingedly connected to the middle end of the locking link 6 through a connecting screw 8 , the connecting screw 8 is sleeved with a torsion spring, the two ends of the torsion spring are respectively connected to the supporting...
specific Embodiment approach 2
[0031] Combine below Figure 1-13 Describe this embodiment, this embodiment will further explain the first embodiment, the pressure block 7 is an arc-shaped structure, and the middle end of the outer side of the pressure block 7 is provided with a spring pin, which can realize locking during the locking process. self-centering function.
specific Embodiment approach 3
[0032] Combine below Figure 1-13 Describe this embodiment, this embodiment will further explain Embodiment 1, the support shell 1 is a cylindrical structure, the lower end of the support shell 1 is provided with a plurality of briquetting grooves 1-2, the briquetting The number of grooves 1-2 is the same as the number of pressure blocks 7; multiple pressure block grooves 1-2 of one locking mechanism can be mated with multiple pressure blocks 7 of another locking mechanism to achieve multi-joint connection.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More