

A Workpiece Pose Adjustment Method Based on Iterative Registration of Geometric Features of Measurement Points
A technology for adjusting geometric features and poses, applied in measurement devices, instruments, etc., to solve problems such as no spatial relationship and unrealizable registration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
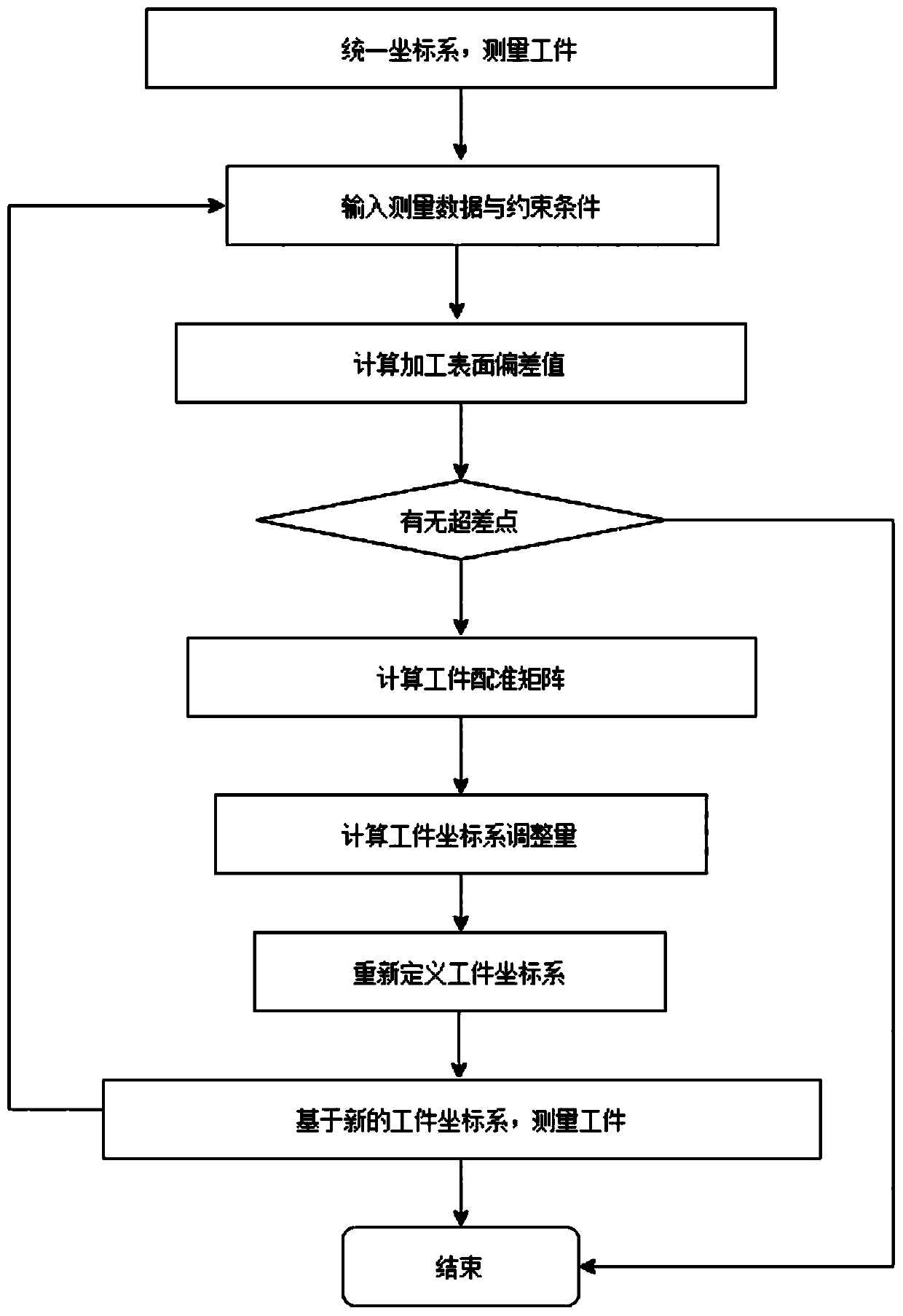
[0099] Such as figure 1 As shown, the present invention analyzes the processing errors of curved surfaces with different tolerances on the basis of theoretical and actual contact measurement data, and proposes a method for adjusting the workpiece pose based on iterative registration of geometric features of measurement points, including the following steps:
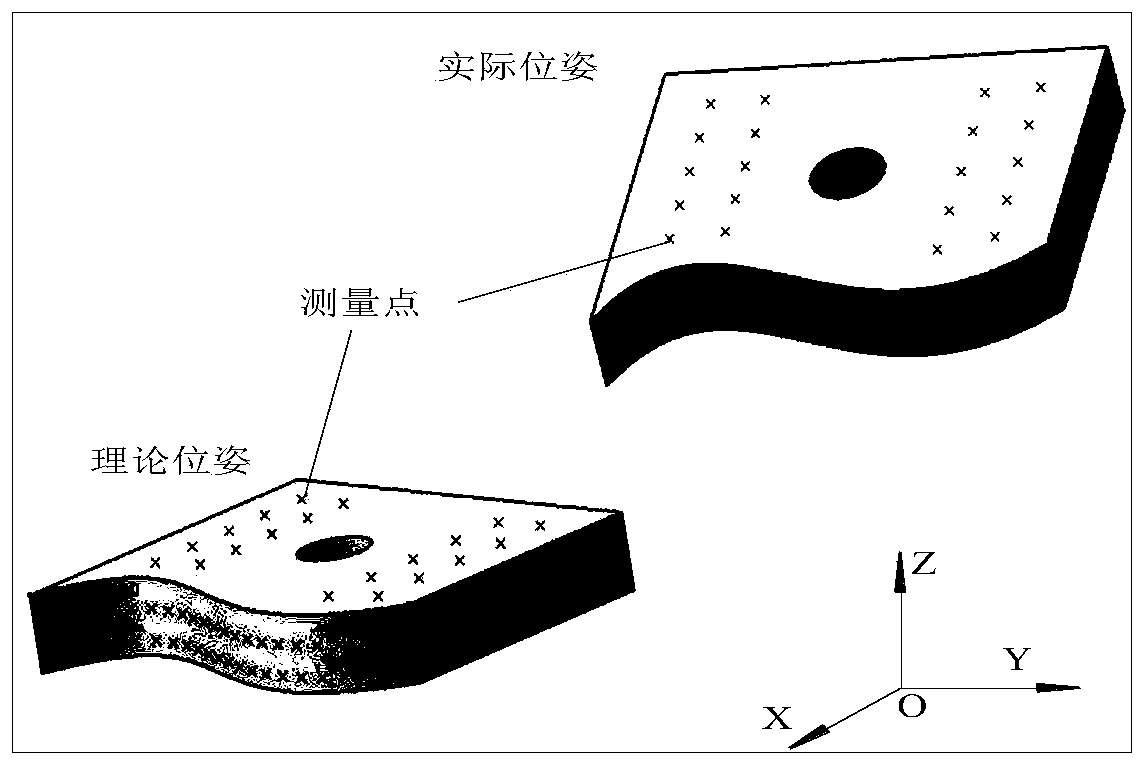
[0100] Step 1: Unify the measurement coordinate system and the workpiece coordinate system, and detect the workpiece to obtain contact measurement data; the contact measurement data includes the theoretical and actual measurement point coordinates with the determined detection direction, the measurement vector direction and tolerance of the detection surface.
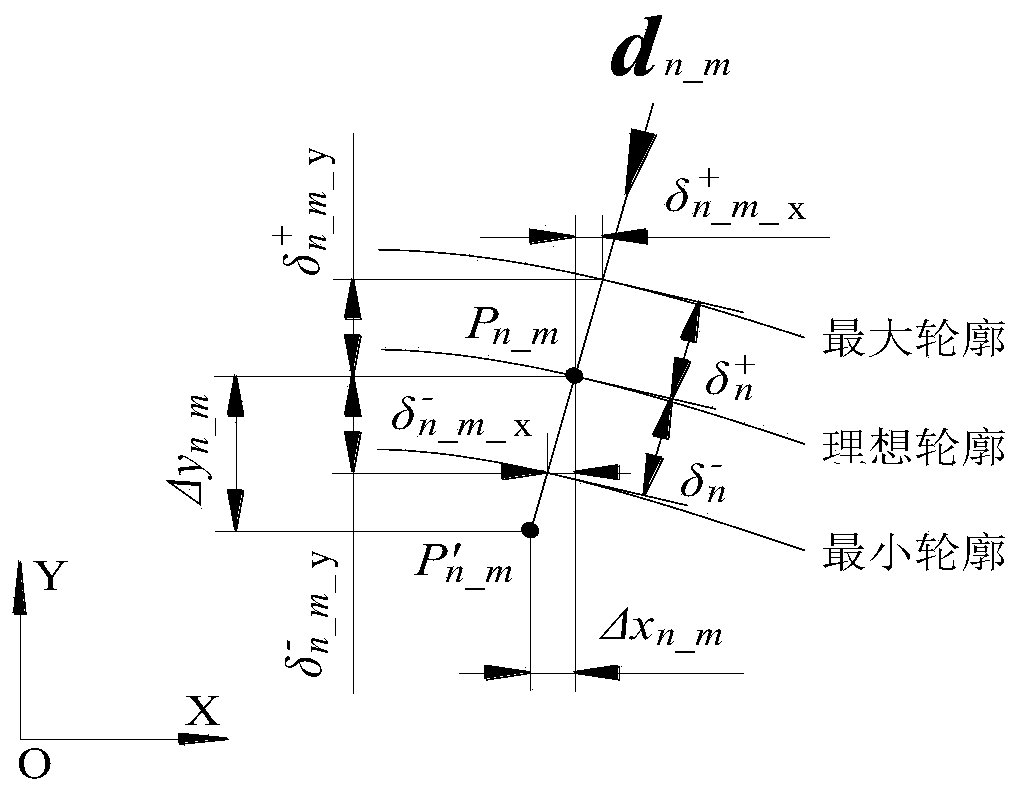
[0101] Step 2: Calculate the machining deviation and over-tolerance OT of the measurement point according to the contact measureme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More