

Pneumatic soft manipulator
A technology of manipulators and pneumatic fingers, which is applied in the field of manipulators, can solve the problems of poor versatility and difficulty in grasping slightly larger or smaller items, and achieve the effect of convenient grasping and expanding the grasping range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
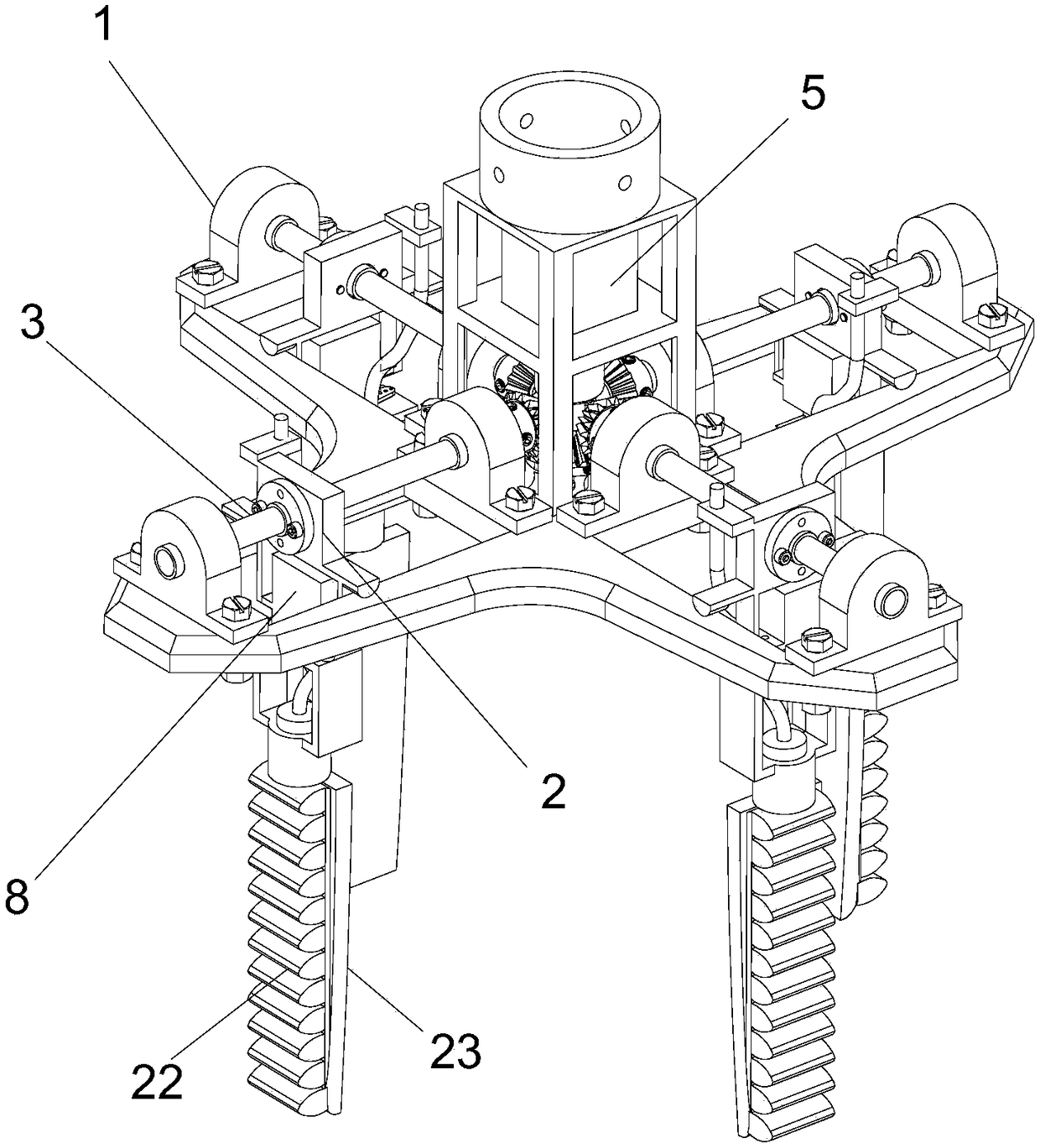
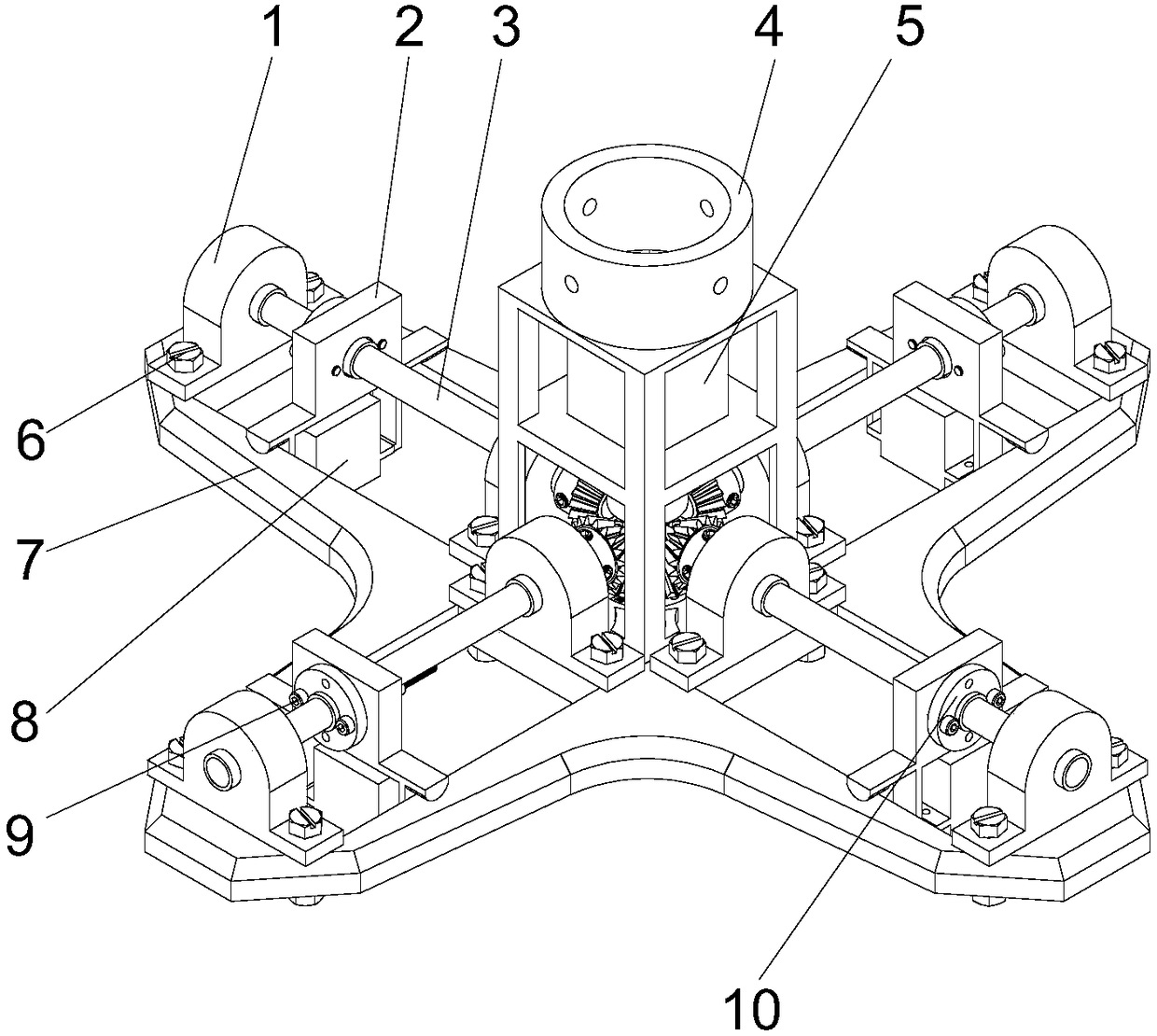
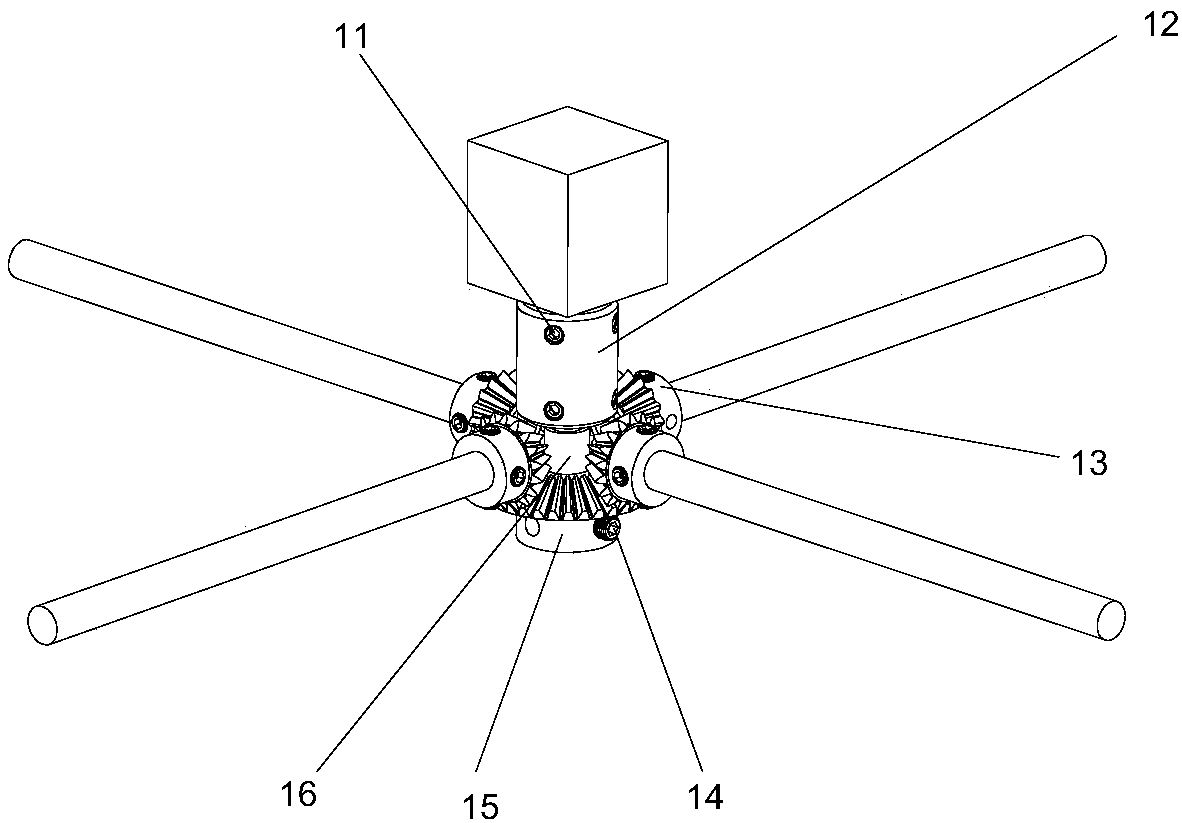
[0022] figure 1 It is a structural schematic diagram of the present invention; as shown in the figure: the pneumatic soft manipulator of this embodiment includes a chassis 7, and four screw rods 3 arranged on the chassis 7 correspond to the sliders arranged on the screw rods 3 one by one. assembly, a pneumatic finger assembly driven by the slider assembly, and a drive motor for driving the four screw rods 3 to rotate synchronously; the slider assembly includes a slider body 2 and The flange plate 10 fixed on the slider body 2 by the set screw 9; the flange plate 10 is provided with a threaded hole threaded with the screw rod 3; when the distance between each pneumatic finger needs to be adjusted, The drive motor simultaneously drives four screw rods 3 to rotate synchronously; since the screw rod 3 cooperates with the flange plate 10 fixed on the slider to form a nut pair of the screw rod 3 , the rotation of the screw rod 3 is transformed into the movement of the slider along t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More