

Vehicle longitudinal following control method
A following control and vehicle technology, which is applied in the field of improving vehicle following performance in expressway heavy truck platoons, can solve problems such as accumulation of errors, impact of platoon driving, speed deviation, etc., to achieve improved safety and high speed consistency , The effect of improving fuel economy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Describe technical scheme of the present invention in detail below in conjunction with accompanying drawing:
[0023] A method for longitudinally following control of vehicles in a platoon of heavy trucks on an expressway, comprising the following steps:
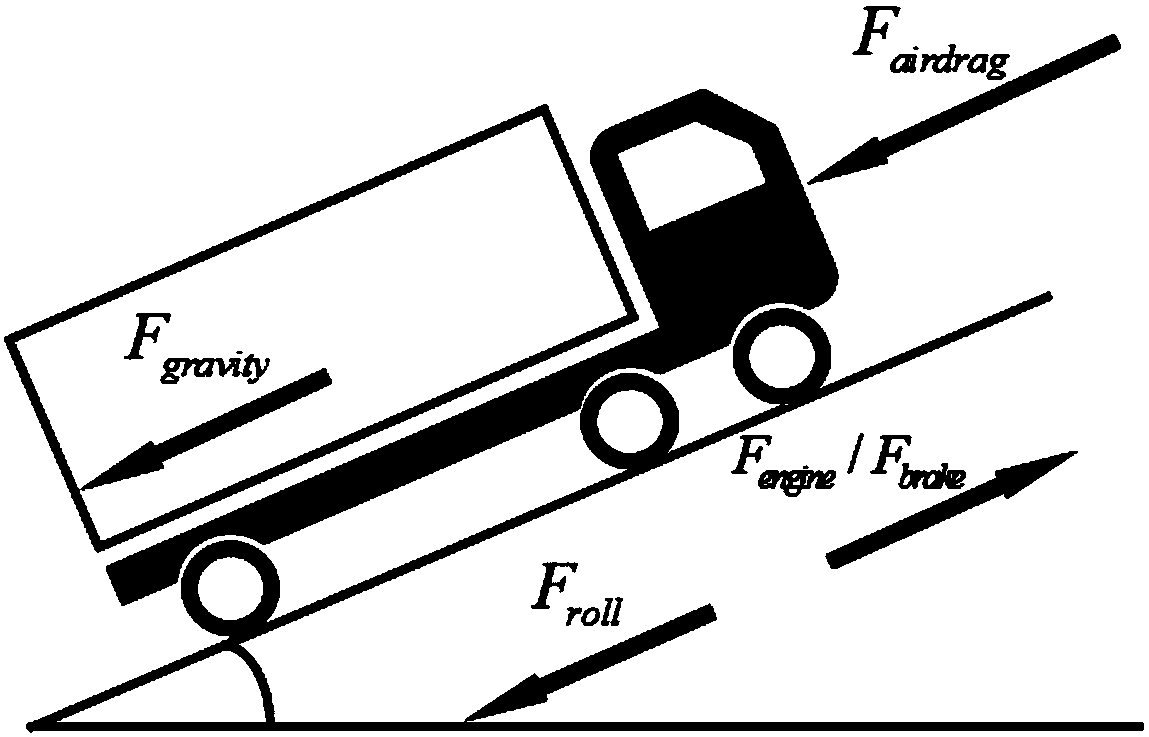
[0024] Step 1: Establish the longitudinal nonlinear dynamics equation of the vehicle according to Newton's second law, such as figure 2 , the equation is as follows:
[0025]
[0026] Among them, m is the mass of the vehicle, in kg; v is the longitudinal velocity of the vehicle, in m / s; F engine is the driving force of the vehicle, the unit is N; F brake is the braking force of the vehicle, in N; F grad is the gravity component of the vehicle, in N; F rolling is the ground friction force on the vehicle, in N; F airdrag is the air resistance on the vehicle, in N.
[0027]
[0028] Among them, T t is the engine torque, in Nm; i g is the gear ratio of the vehicle transmission; i 0 is the transmission rati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More