

An interactive model reference adaptive speed and stator resistance identification method based on sliding mode control
A stator resistance and model reference technology, applied in the direction of controlling generators, controlling electromechanical brakes, controlling electromechanical transmissions, etc., can solve problems such as unsatisfactory performance and fixed parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
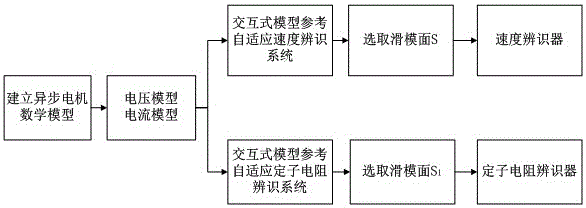
[0067] Embodiment 1: as Figure 1-4 As shown, an interactive model reference adaptive speed and stator resistance identification method based on sliding mode control, first in the two-phase static Under the coordinate system, establish the mathematical model of the asynchronous motor; calculate the voltage model and current model according to the mathematical model of the asynchronous motor, observe the rotor flux linkage through the voltage model and current model, and then construct an interactive model to refer to the adaptive speed identification system and interactive Model reference adaptive stator resistance identification system; according to the constructed interactive model reference adaptive speed identification system and interactive model reference adaptive stator resistance identification system, the sliding mode control method is used to design the speed identifier and stator resistance identifier To identify the speed and stator resistance of the asynchronous...
Embodiment 2
[0093] Embodiment 2: as Figure 1-4 As shown, an interactive model reference adaptive speed and stator resistance identification method based on sliding mode control, the steps of the method are as follows: Under the coordinate system, establish the mathematical model of the asynchronous motor; calculate the voltage model and current model according to the mathematical model of the asynchronous motor, observe the rotor flux linkage through the voltage model and current model, and then construct an interactive model to refer to the adaptive speed identification system and interactive Model reference adaptive stator resistance identification system; according to the constructed interactive model reference adaptive speed identification system and interactive model reference adaptive stator resistance identification system, the sliding mode control method is used to design the speed identifier and stator resistance identifier To identify the speed and stator resistance of the asy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More