A method for optimizing a work cycle in a robot system
A technology of robot system and work cycle, applied in general control system, control/regulation system, instrument, etc., can solve problems such as not optimal work cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In the context of this disclosure, "cycle time" may refer to the time required for a robotic system to perform a task sequence once. However, due to the periodic nature of work cycles, subsequent work cycles may start before the previous work cycle is ready. Thus, the term "cycle time" may also refer to the average time required for a robotic system to perform a task sequence when performing a (mass) sequence of tasks.
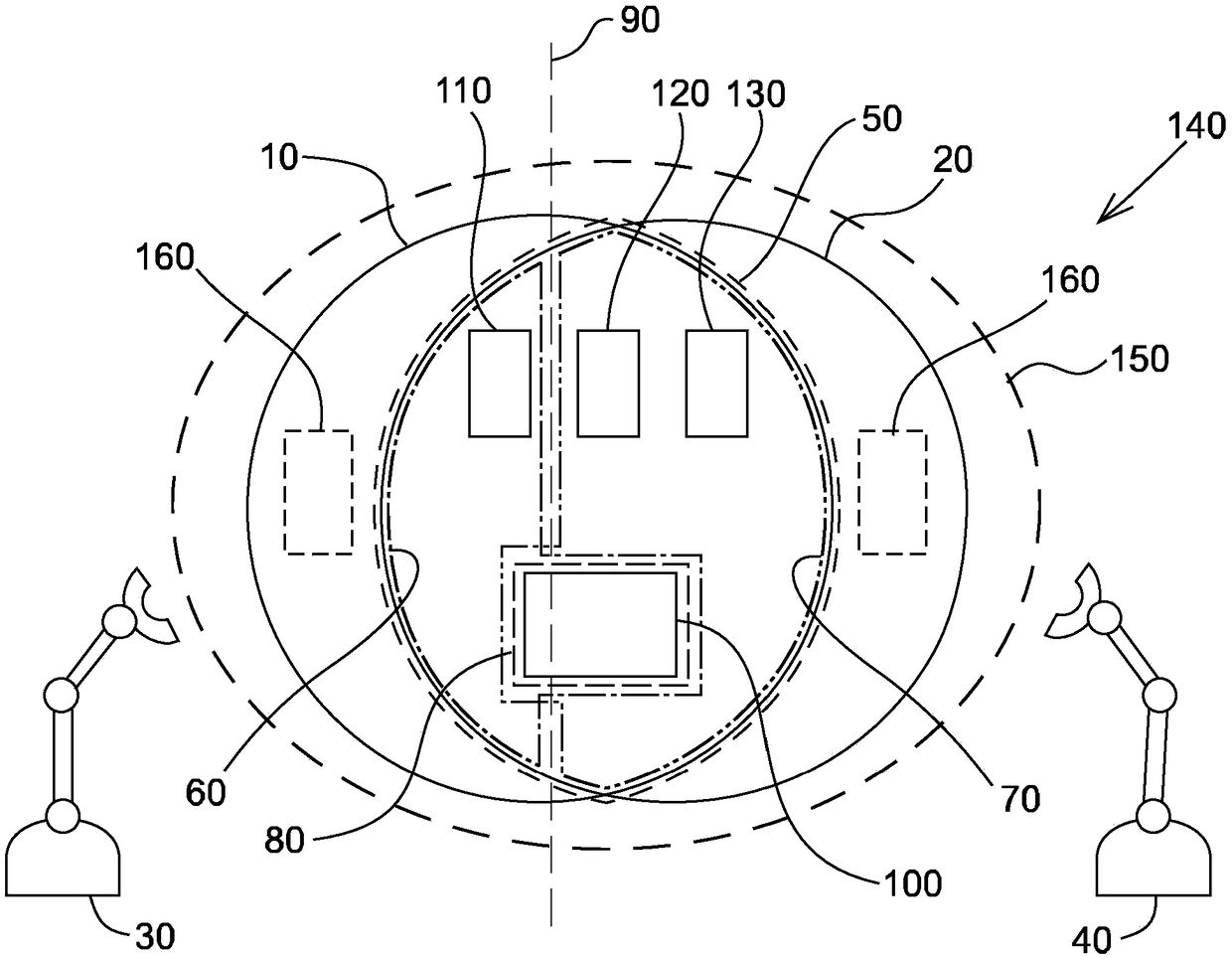
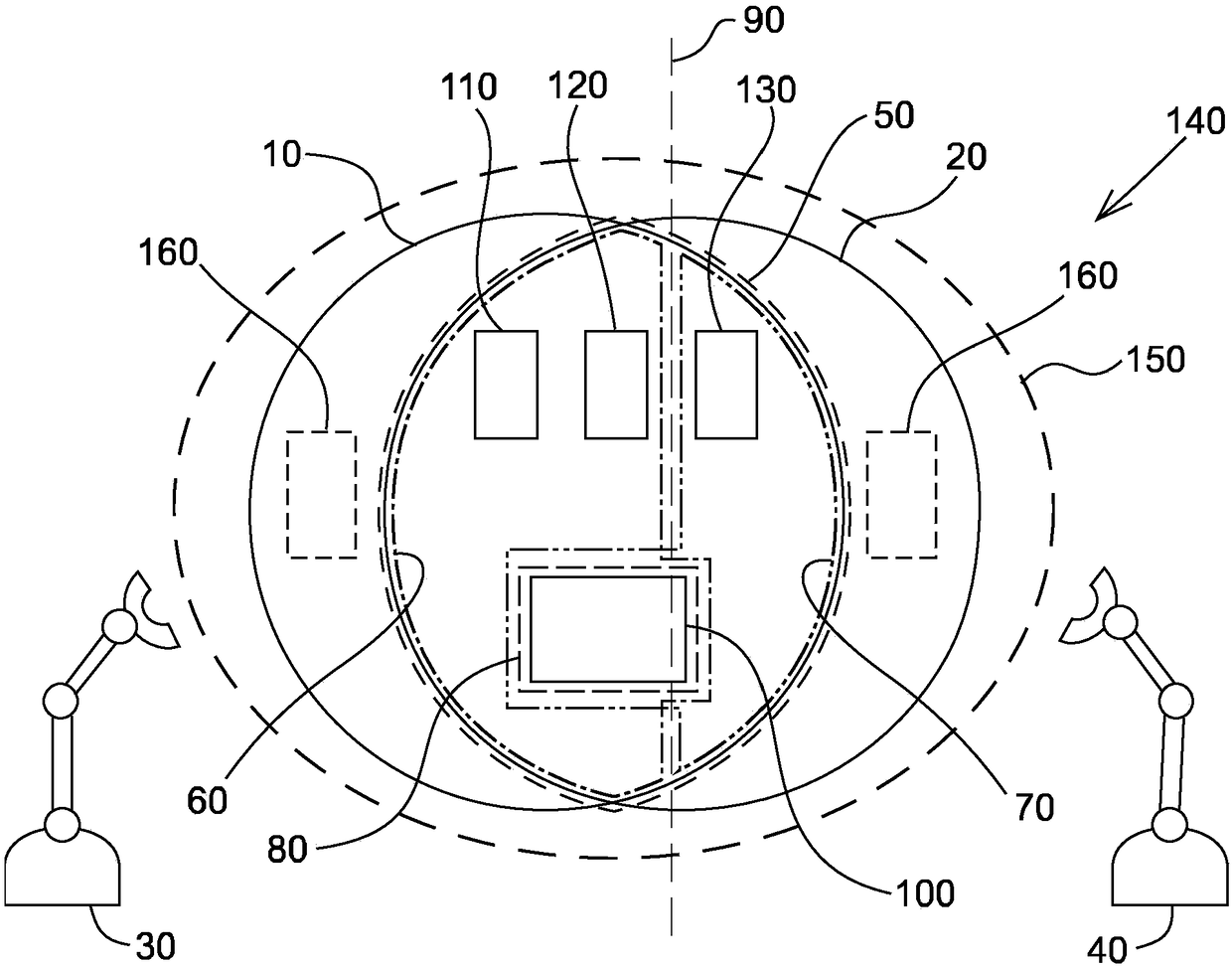
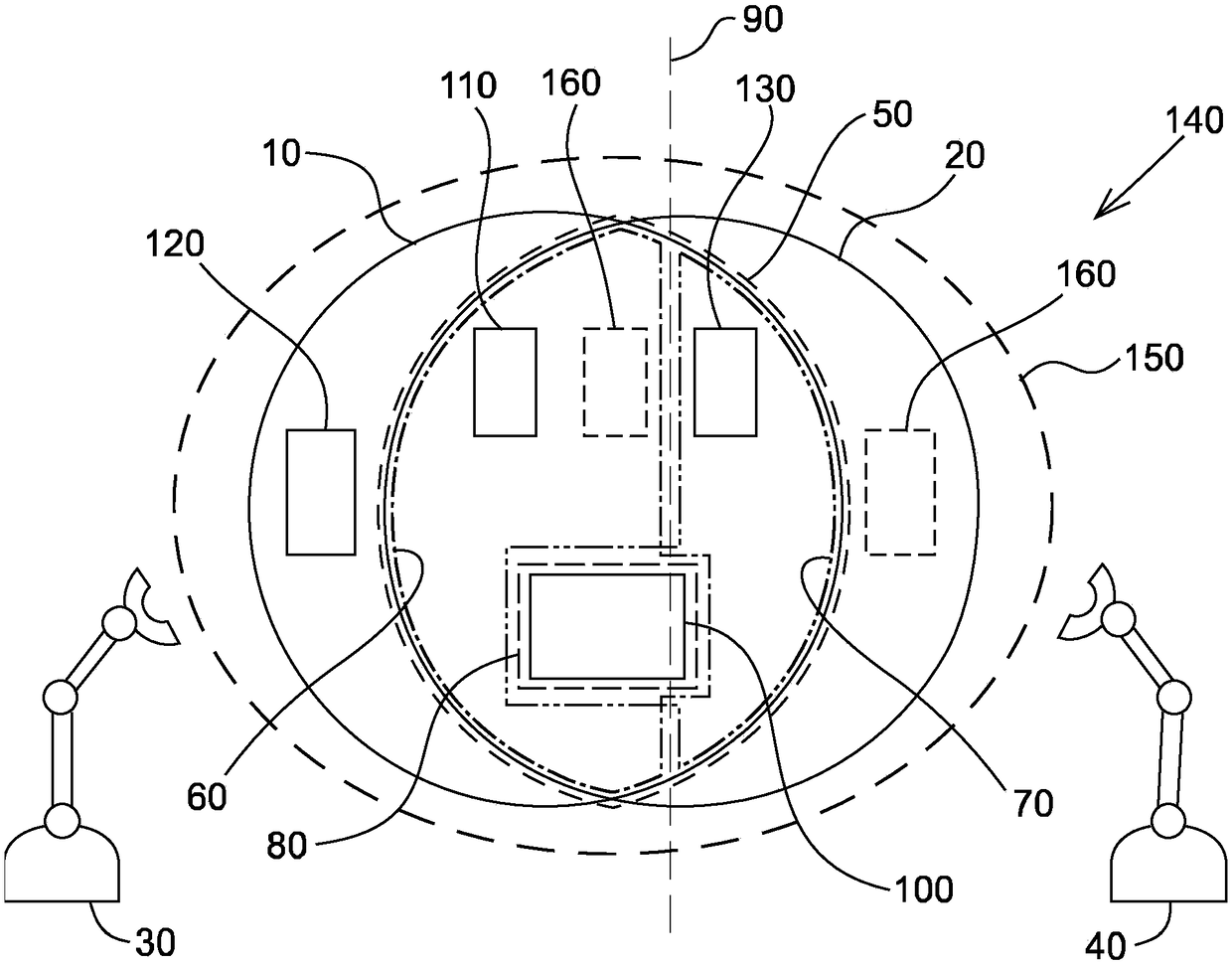
[0024] refer to figure 2 , given a layout with figure 1 The same in , and the overall task is the same (fit the three parts together at the fixture). However, the working area division differs in that the first feeder and the second feeder are assigned to the first manipulator, and only the third feeder is assigned to the second manipulator. suppose to pass figure 2 A division of the working area can be achieved than by figure 1 The work area division of the shorter cycle time, then the optimization problem is restricted to according to figure 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More