Micro-gyroscope sliding mode control method with error limitation
A control method and micro-gyroscope technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems that the MEMS micro-gyroscope error indicators cannot meet the design requirements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0074] The technical solutions of the present invention will be further described in detail below in conjunction with specific embodiments.
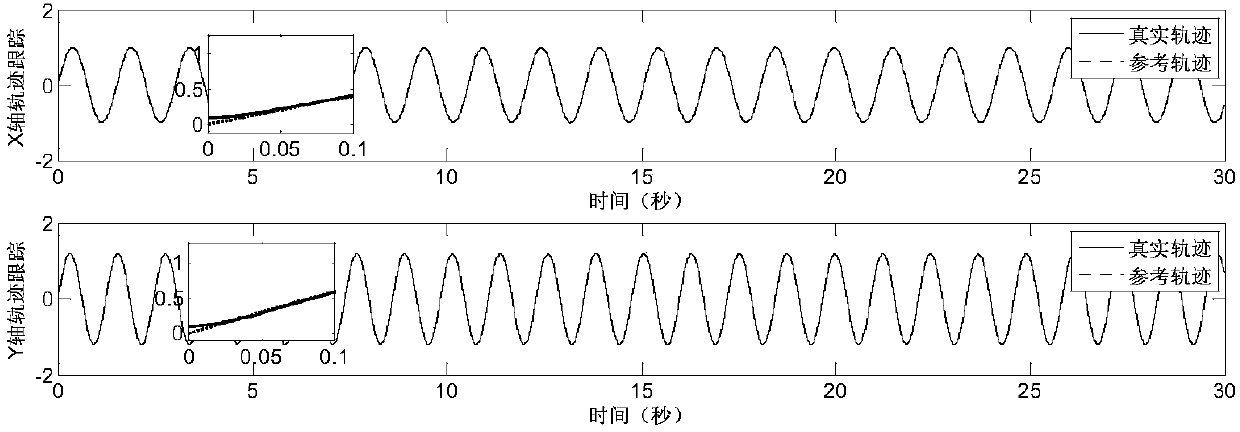
[0075] Such as figure 1 A micro-gyroscope sliding mode control method with error limitation shown includes the following steps:
[0076] 1) Establish a mathematical model of the micro gyroscope;
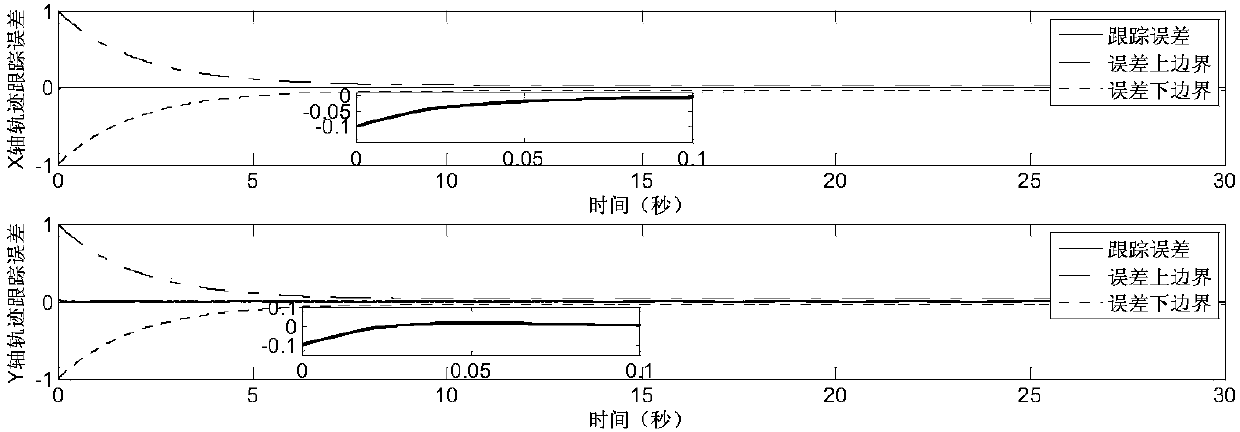
[0077] 2) The design of the error limit boundary;
[0078] 3) Equivalent error transformation;
[0079] 4) Sliding mode surface design using equivalent error;
[0080] 5) Design of control force;
[0081] 6) Proof of stability.
[0082] The mathematical model of the micro-gyroscope in the aforementioned step 1) is:
[0083]
[0084] in
[0085] Where x, y represent the displacement of the gyroscope in the direction of the XY axis, d xx d yy is the elastic coefficient of the spring in the direction of XY axis, k xx k yy is the damping coefficient in the direction of XY axis, d xy 、k xy is the coupling parameter caused by proce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More