

Multi-auv distributed cooperative tracking control method based on uncertain ocean current disturbance
A tracking control and distributed technology, applied in the field of multi-AUV distributed formation control, can solve the problems of limited measurement and communication distance, inaccurate underwater positioning, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0161] Example 1: Multi-AUV Cooperative Formation Control Based on Straight Path
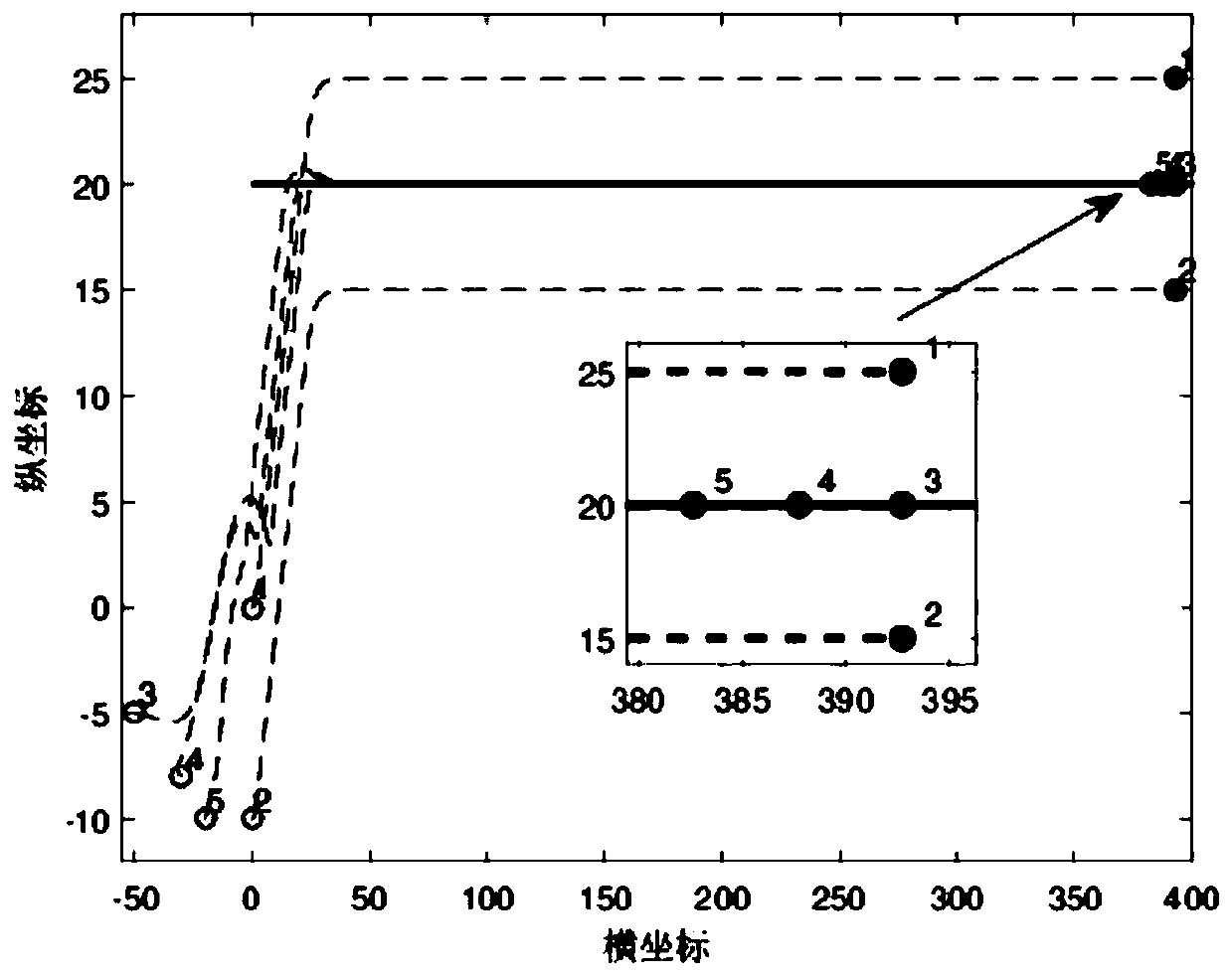
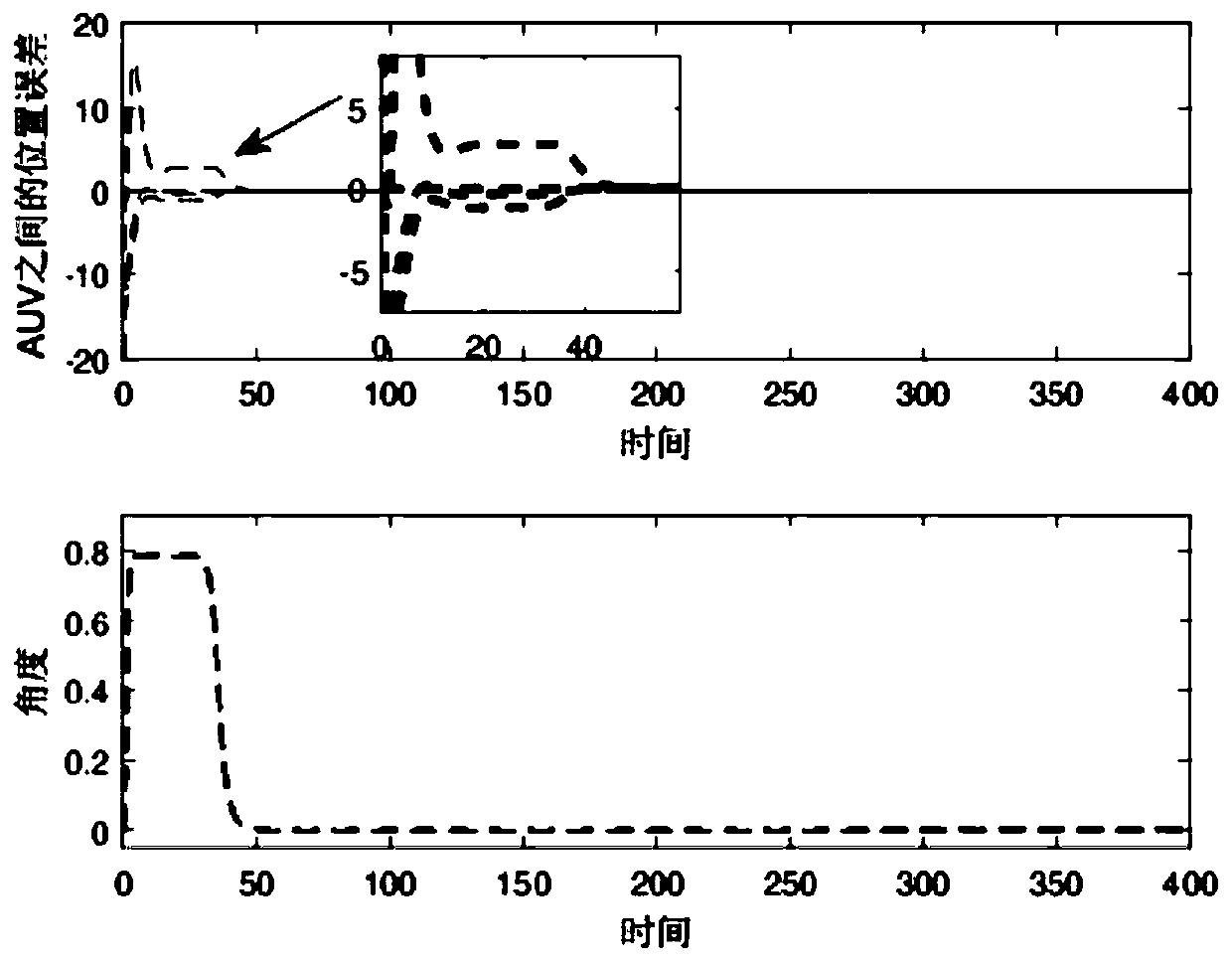
[0162] figure 2The schematic diagram of line tracking is shown, the hollow circle indicates the initial position of the multi-AUV, the solid circle indicates the key position of the multi-AUV, the black realization indicates the given path, and the black dotted line is the trajectory of the AUV. Depend on figure 2 It can be seen that multiple AUVs can form a good motion formation and path tracking effect from any initial position. from image 3 It can be seen that during the movement of multiple AUVs, even if there is uncertain ocean current interference, the relative error between multiple AUVs gradually decreases and tends to 0, and they have a consistent movement direction. Therefore, the present invention provides a collaborative tracking control method based on a multi-AUV distributed formation control platform that can effectively reduce the amount of controller information, while usi...
Embodiment 2
[0165] Example 2: Multi-AUV Cooperative Formation Control Based on Hybrid Curve Path
[0166] In order to verify the effectiveness of the present invention, under the premise of not changing the control parameters, the given path curve is set as a mixed curve, that is, a mixture of sinusoidal curve and straight line. from Figure 4 It can be seen that the present invention can quickly and effectively realize the coordinated tracking control of a given path. from Figure 4 Partial enlarged view of and Figure 5 It can be seen that when multiple AUVs track a sinusoidal curve, they have been able to achieve consistent formation movement in direction and position. Therefore, the present invention aims at problems such as inaccurate underwater self-positioning of multi-AUV mobile platforms, limited measurement and communication distances between AUVs, and the influence of uncertain ocean current disturbances, etc., and proposes a multi-AUV distributed collaborative Track contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More