

Sweeping robot and control method and device thereof
A sweeping robot and control method technology, applied in the field of automation, can solve problems such as low cleaning efficiency and uneven garbage distribution, and achieve the effect of optimizing the degree of intelligence and improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
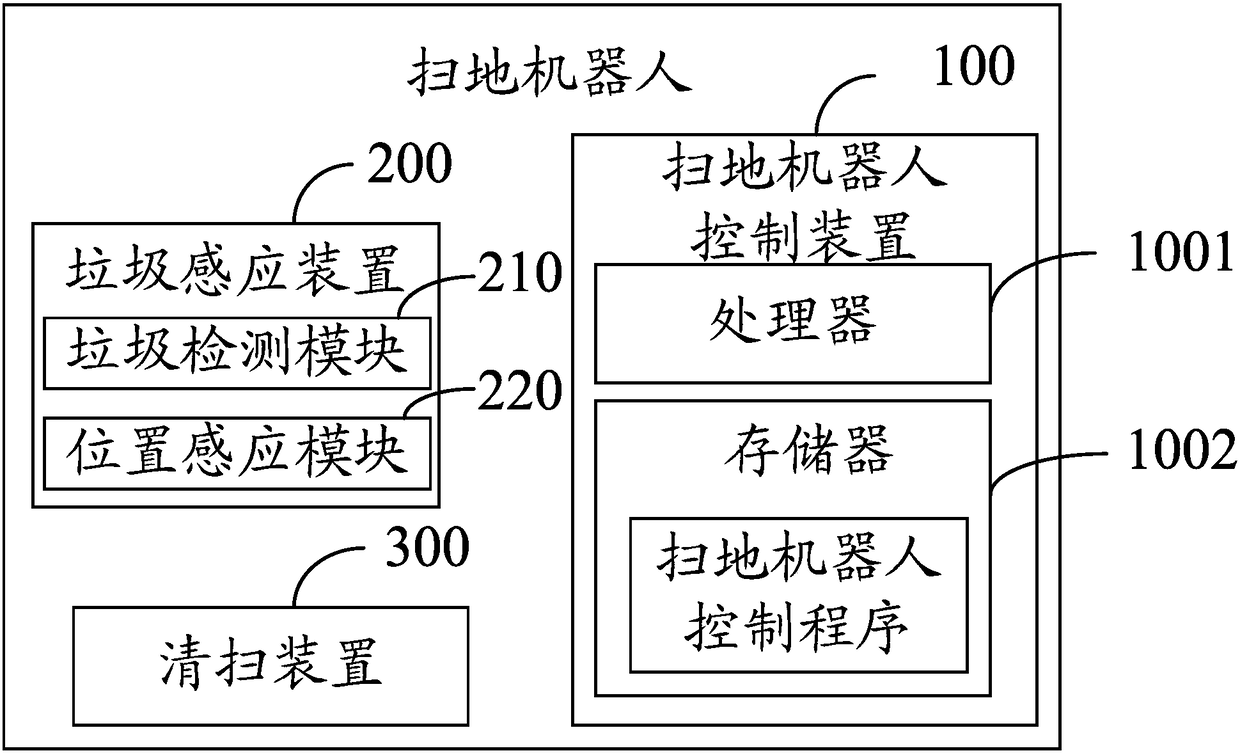
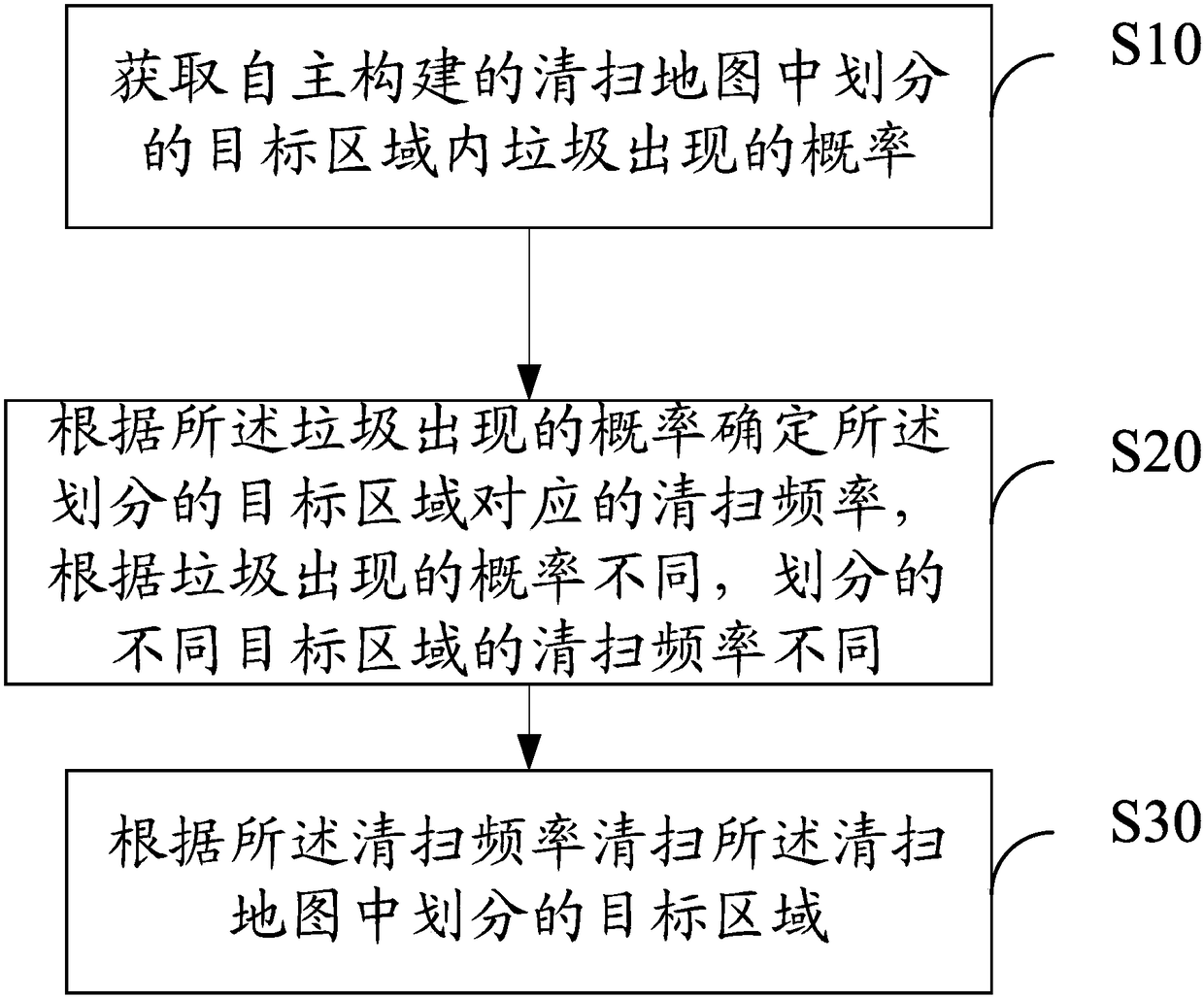
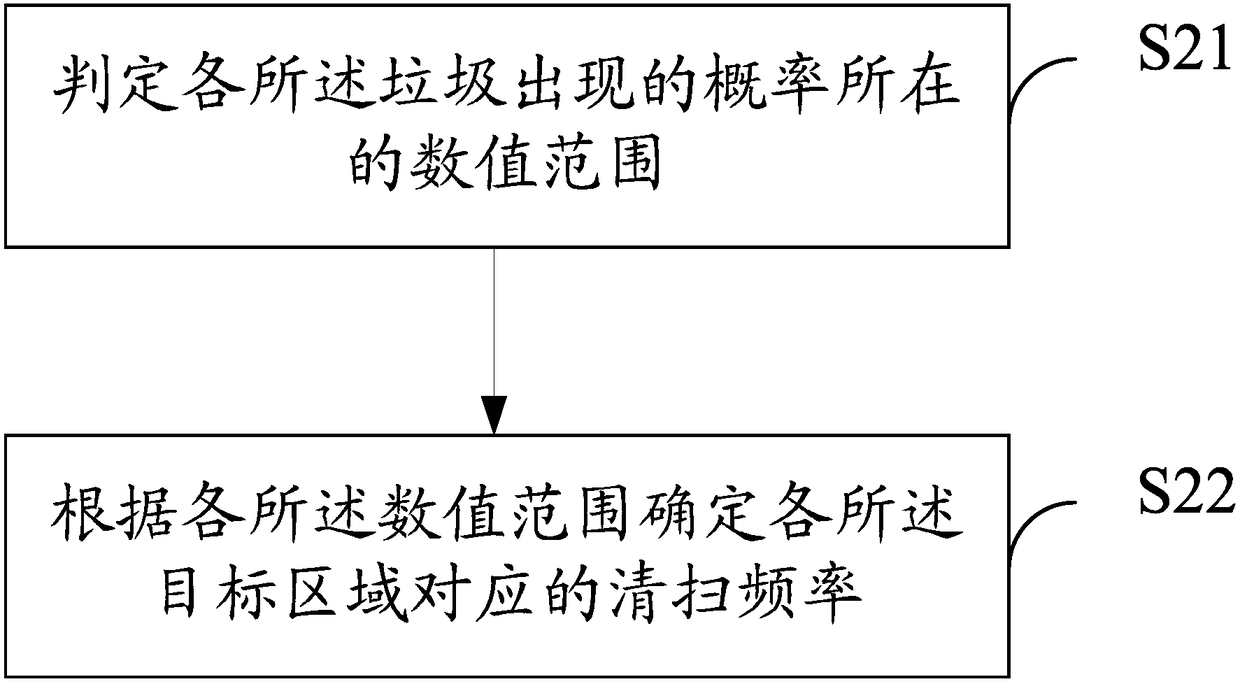
[0039] The main solution of the embodiment of the present invention is to obtain the probability of garbage occurrence in the divided target area in the self-constructed cleaning map; determine the cleaning frequency corresponding to the divided target area according to the probability of garbage occurrence; The probabilities are different, and the cleaning frequencies of different divided target areas are different; the target areas divided in the cleaning map are cleaned according to the cleaning frequency.
[0040] Because in the prior art, the same frequency is generally used to clean different areas, and the pollution levels of different areas are different, so the sweeping robot has the problem of low cleaning efficiency.
[0041] The present invention provides the above solution, realizes that the sweeping robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More