

Inverse kinematic solving method of manual operation and control of multi-joint mechanical arm
A multi-joint manipulator, inverse kinematics technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0014] The solution process of the present invention will be described in more detail below based on the drawings.
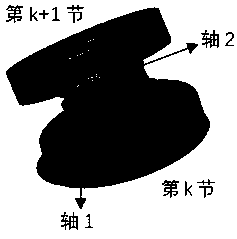
[0015] Assuming that the total number of joints of the multi-joint manipulator is n, from the motor to the outside, it is the nth section, the n-1th section...the first section, the length of each joint is L, and the movement time is t. Explore the movement of each joint in the case of three-dimensional movement from two movement modes. Indicate as figure 1 .
[0016] (1) Operating space and joint space
[0017] Since the space curve equation has many expressions, the following equations are selected to describe the space trajectory for the convenience of description:
[0018]
[0019] Among them, x, y, z represent the three-dimensional coordinates of the space curve trajectory. In the above expression, the function expression of x and z with respect to the independent variable y is given. It is easy to get a very important property of the trajectory, that is, for the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More