

A two-axis servo control system orthogonality compensation method for vehicle-mounted photoelectric sighting and sighting system
A technology of servo control system and sight-seeing system, which is applied in the direction of electric speed/acceleration control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Describe the present invention below in conjunction with specific embodiment:
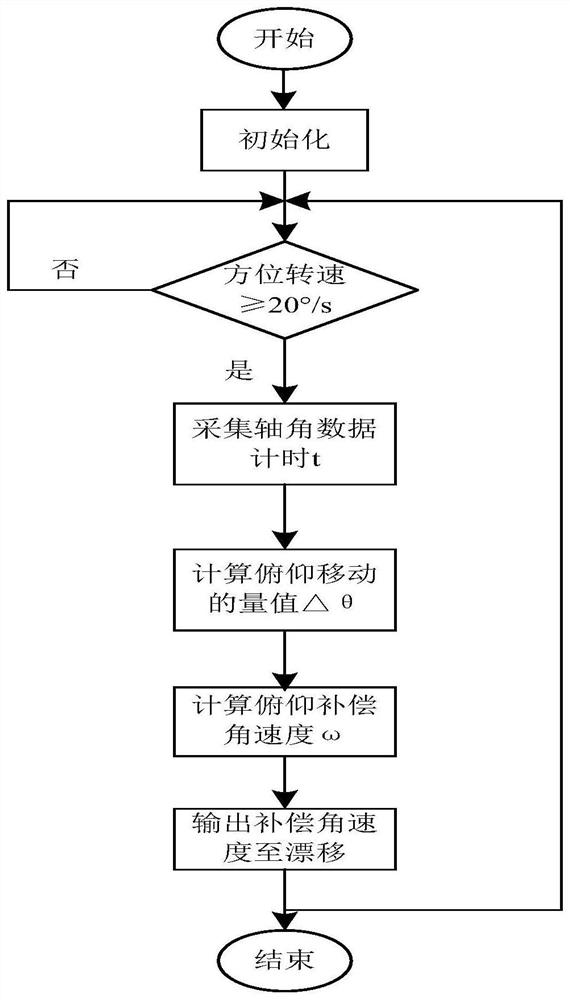
[0018] Aiming at the orthogonality problem of the vehicle-mounted photoelectric observation and sighting system, the present invention proposes to solve the orthogonality problem of the vehicle-mounted photoelectric observation and sighting system from the servo control system, provides a compensation method for solving the orthogonality error, and carries out the orthogonality analysis of the vehicle-mounted photoelectric observation and sighting system. Compensation makes it controlled within a reasonable range, enabling the operator to accurately aim and capture the target.
[0019] The main principle of the present invention is that when the azimuth is moving at a high speed, the DSP of the servo control system is used to collect the angle value of the pitching motion, and the angular velocity of the pitching motion is calculated, and it is superimposed into the control system as a revers...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More