

Multi-degree-of-freedom robot instrument finger and application thereof
A degree of freedom, robot technology, applied in the field of robotics, can solve problems such as application difficulties, lack of force perception ability of operating equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific implementation manners of the present invention are given below and described in conjunction with the accompanying drawings.
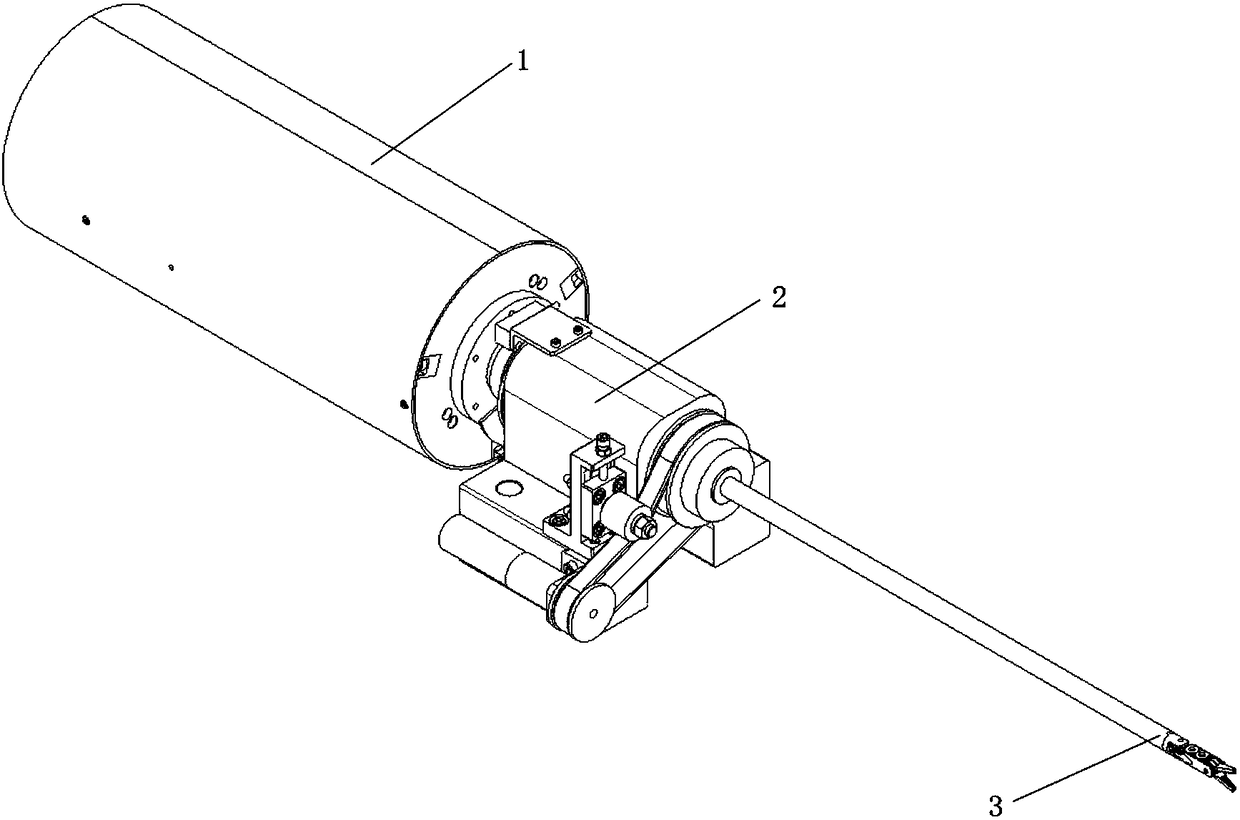
[0050] combine figure 1 , 2 , 4, 9 and 13, a robot instrument finger with multiple degrees of freedom, which consists of a drive mechanism 1, a mounting bracket mechanism 2 and a wrist finger mechanism 3. The driving mechanism 1 is connected with the wrist finger mechanism 3 via the mounting bracket mechanism 2 .
[0051] The wrist-finger mechanism 3 is driven by the cable with three degrees of freedom of pitching, deflection and / or clamping by the driving mechanism 1 .
[0052] The wrist finger mechanism 3 is driven by the mounting bracket mechanism 2 with a degree of freedom of rotation.
[0053] The wrist finger mechanism 3 has three degrees of freedom of motion, pitch, deflection and / or opening and closing.
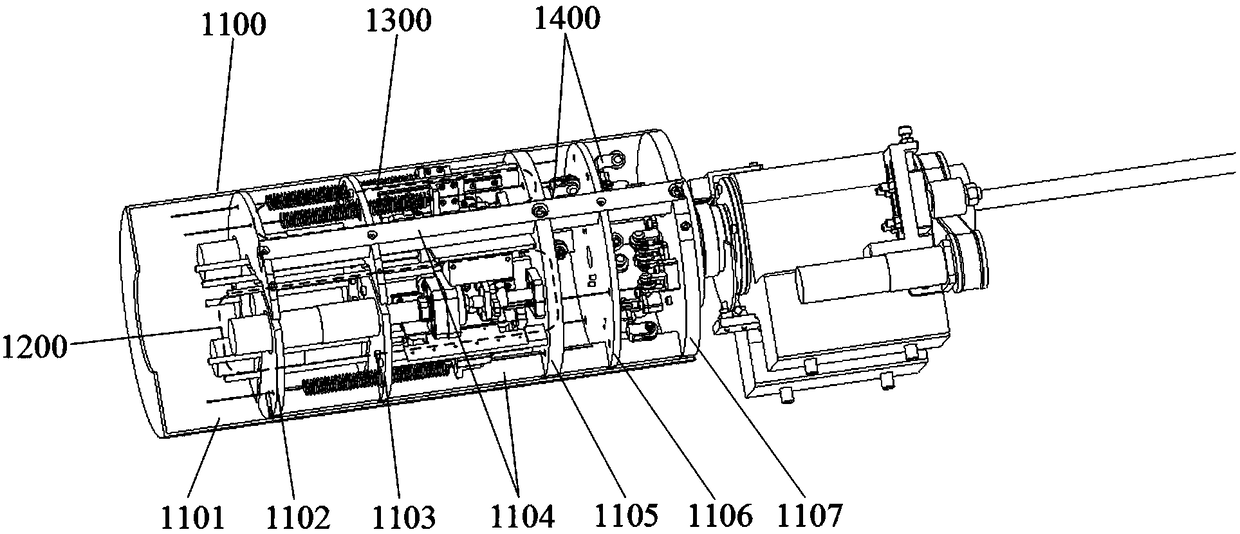
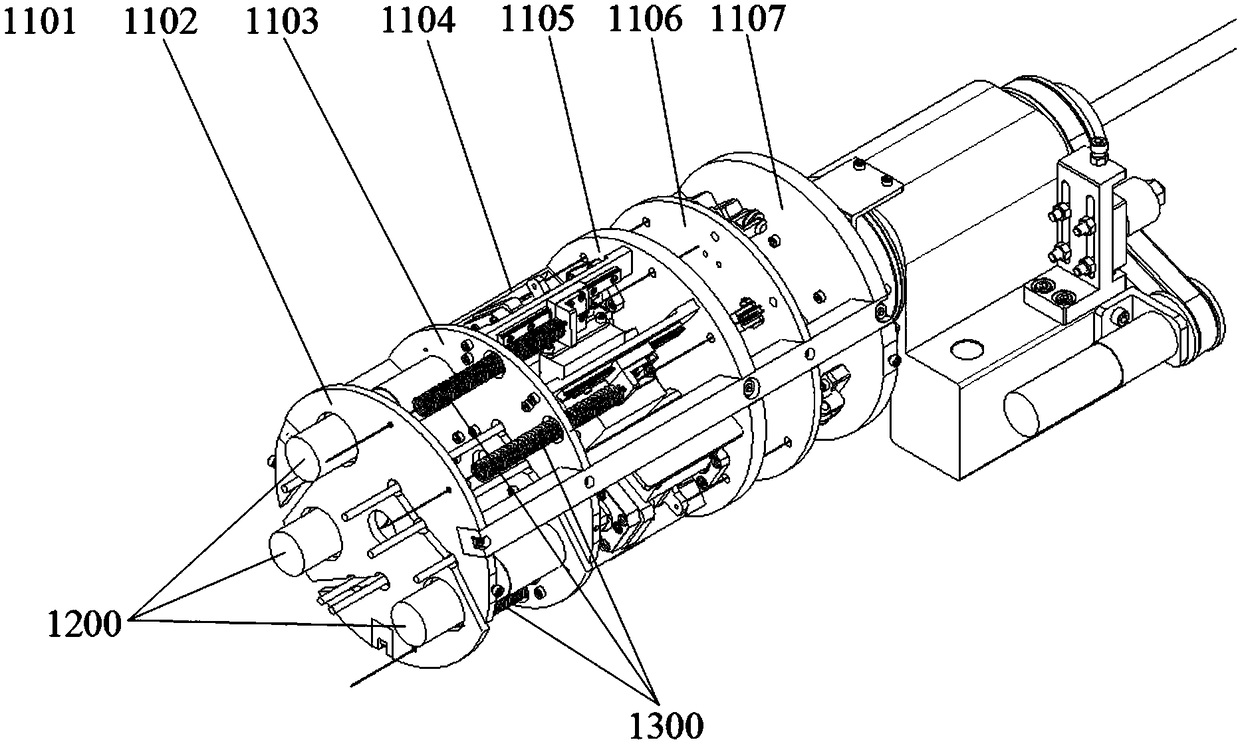
[0054] combine Figures 1 to 8 Further, the driving mechanism 1 is composed of a frame body mechanism 1100, 3 groups...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More