

Automatic driving control system and method, computer server and automatic driving vehicle
A computing server and automatic driving technology, applied in control/regulation systems, non-electric variable control, motor vehicles, etc., can solve problems such as undisclosed automatic driving vehicle control schemes, and achieve the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
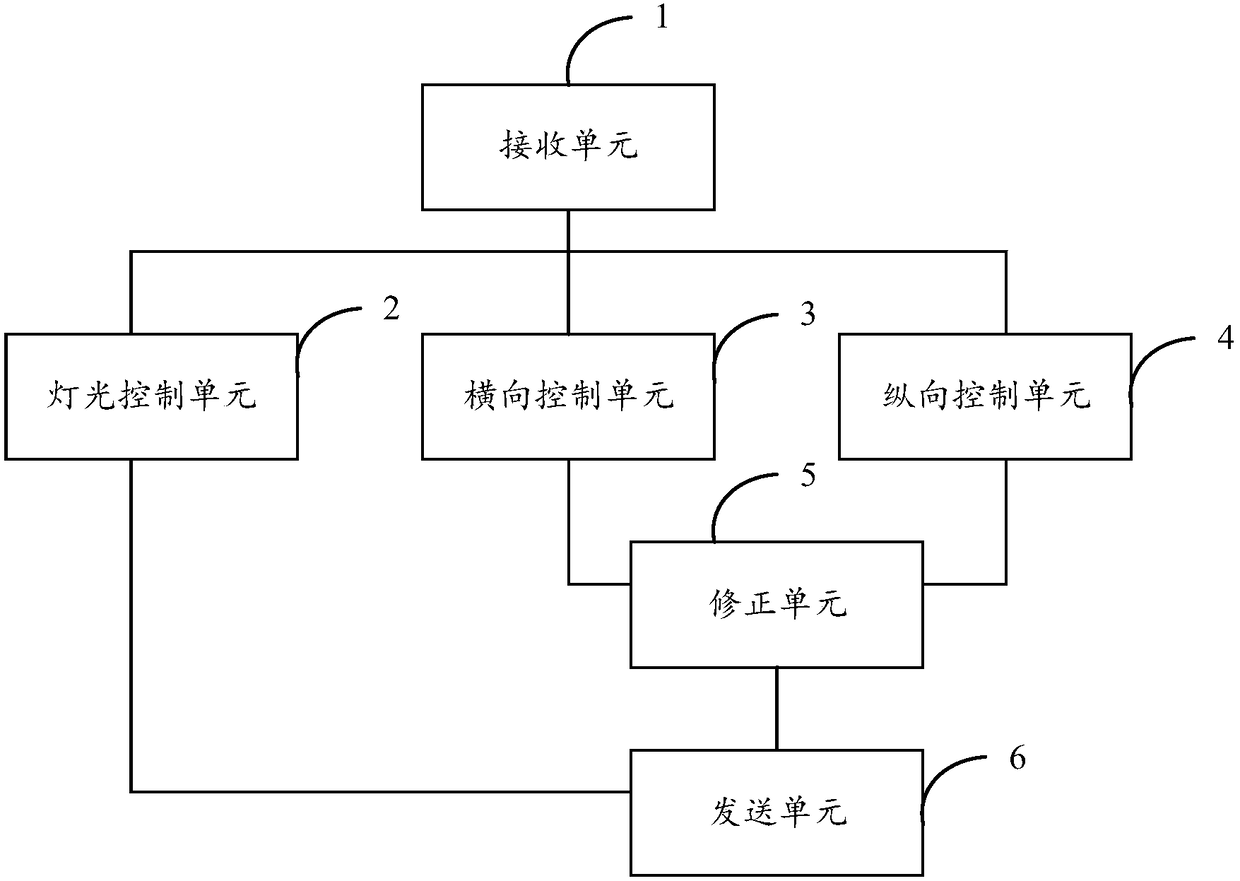
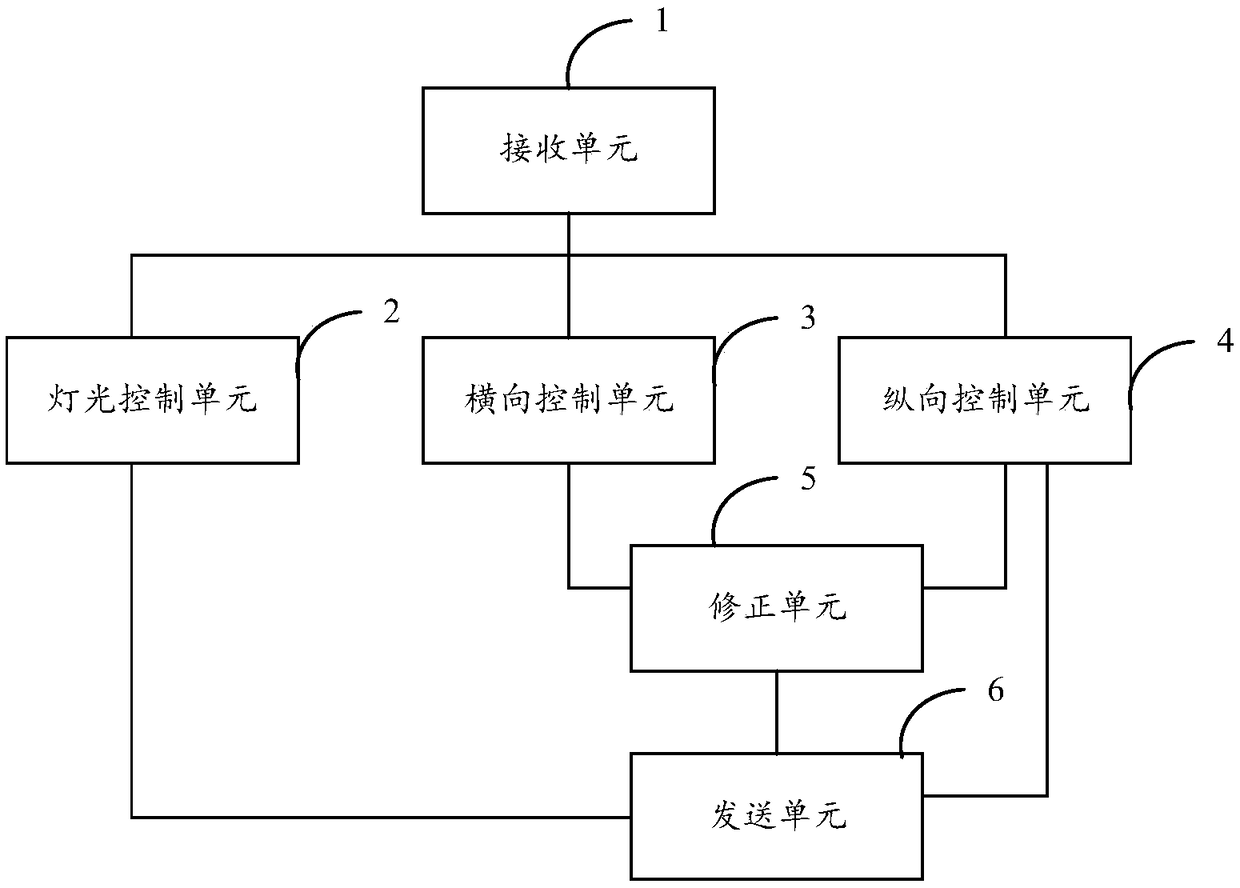
[0035] see figure 1 , is a schematic structural diagram of an automatic driving vehicle control system in an embodiment of the present invention, the system includes a receiving unit 1, a lighting control unit 2, a lateral control unit 3, a longitudinal control unit 4, a correction unit 5 and a sending unit 6, wherein:
[0036] a receiving unit 1, configured to receive decision information;
[0037] A lighting control unit 2, configured to generate lighting control information according to the decision information;
[0038] A lateral control unit 3, configured to generate lateral control information according to the decision information;
[0039] A vertical control unit 4, configured to generate vertical control information according to the decision information;
[0040] A correction unit 5, configured to correct the parameters in the horizontal control information and the vertical control information;
[0041] The sending unit 6 is used to send the lighting control informa...
Embodiment 2
[0119] Based on the same concept as the automatic driving vehicle control system provided in the first embodiment, the second embodiment of the present invention provides a method for controlling an automatic driving vehicle. The flow of the method is as follows Figure 9 shown, including:
[0120] Step 101, the receiving unit receives decision information;
[0121] Step 102, the lighting control unit generates lighting control information according to the decision information;
[0122] Step 103, the lateral control unit generates lateral control information according to the decision information;
[0123] Step 104, the longitudinal control unit generates longitudinal control information according to the decision information;
[0124] Step 105, the correction unit corrects the parameters in the horizontal control information and vertical control information;
[0125] Step 106, the sending unit sends the lighting control information, the corrected lateral control information ...
Embodiment 3
[0163] Embodiment 3 of the present invention further provides a computer server, which is provided with any one of the automatic driving vehicle control systems disclosed in Embodiment 1 above.
[0164] The computer server can be hardware devices such as DSP (Digital Signal Processing, digital signal processor), FPGA (Field-Programmable Gate Array, field programmable gate array) controller, desktop computer, mobile computer, PAD, single-chip microcomputer. The receiving unit 1 and the sending unit 6 can be implemented by a communication module on a computer server, such as an antenna. The lighting control unit 2 , the horizontal control unit 3 , the vertical control unit 4 and the correction unit 5 can be set in a processor in a computer server, such as a CPU.
[0165] The computer server can be installed on all types of self-driving vehicles and advanced auxiliary driving vehicles, such as trucks, trucks, buses, passenger cars, trailers, sprinklers, bicycles, etc., to control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More