

Space multi-degree-of-freedom parallel-connection flexible device
A technology with a degree of freedom and compliance, applied in the field of robots, can solve problems such as not being able to fully protect the safety of robots, and achieve the effect of avoiding assembly jamming and avoiding damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Such as Figure 4 As shown, this embodiment includes: a robot, a space parallel compliance device 6 arranged on the end flange 5 of the robot, a shaft part 7 fixed on the moving platform 1 of the parallel compliance device through a clamp, and holes as parts to be assembled Class Part 8.
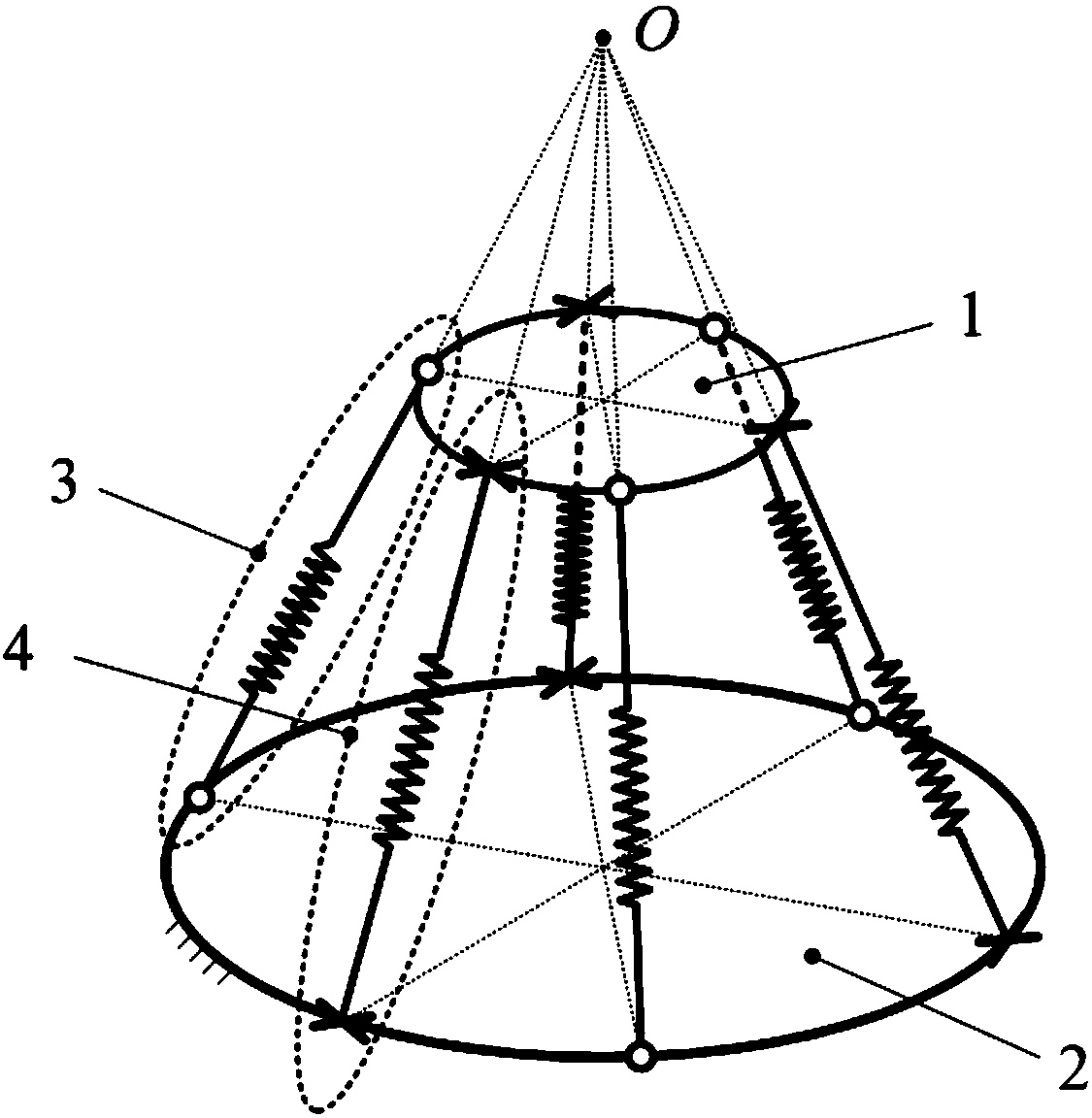
[0019] Such as figure 1 As shown, the space parallel compliance device, the device consists of a 3UPU-3SPS parallel compliance device structure through a moving platform 1, a base 2, three SPS spring branch chains 3 and three UPU type spring branch chains 4. The axes of all spring branches converge at a point O, which is the terminal operating point of the compliance device.
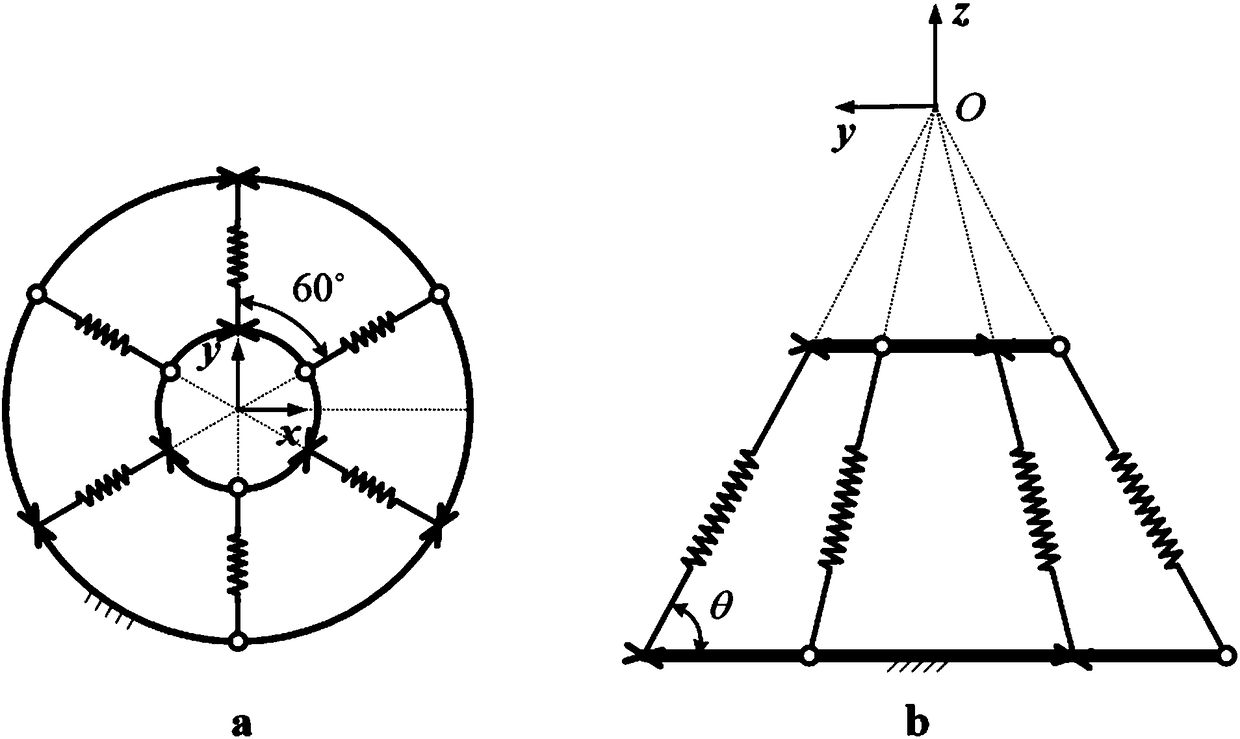
[0020] Such as figure 2 As shown, the space parallel compliance device is a center-symmetrical structure, the moving platform and the base are coaxial in the initial state, and all the hinges on the moving platform and the base are circularly distributed. UPU type spring branch chains and SPS type spring br...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More