Unmanned aerial vehicle anti-collision control method
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A control method and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve problems such as UAV collision, achieve collision prevention, good implementation effect, and control method smart effect
Active Publication Date: 2018-08-24
SHENZHEN ZHENDI INFORMATION TECH CO LTD
View PDF9 Cites 1 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] The embodiment of the present invention provides a UAV anti-collision control method to solve the existing technical problem of multiple UAVs colliding with each other
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
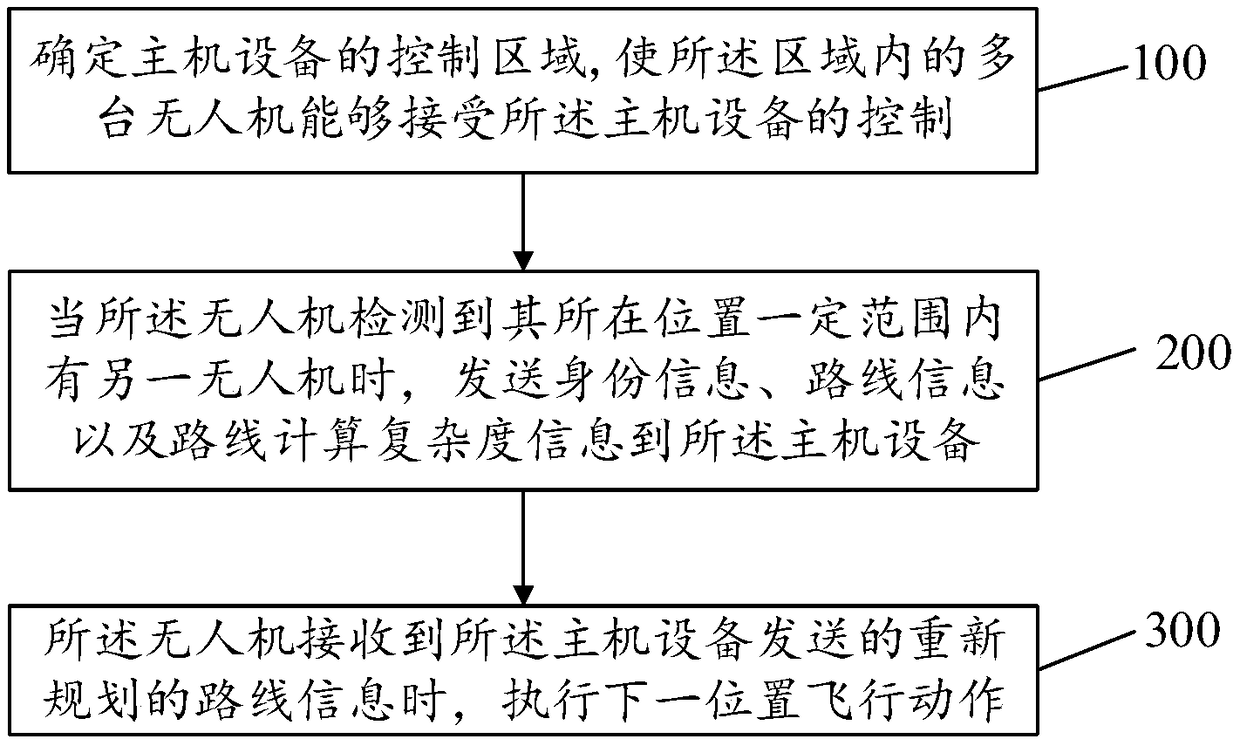
[0059] A kind of unmanned aerial vehicle anti-collision control method provided in the embodiment of the present invention, comprises the following steps:
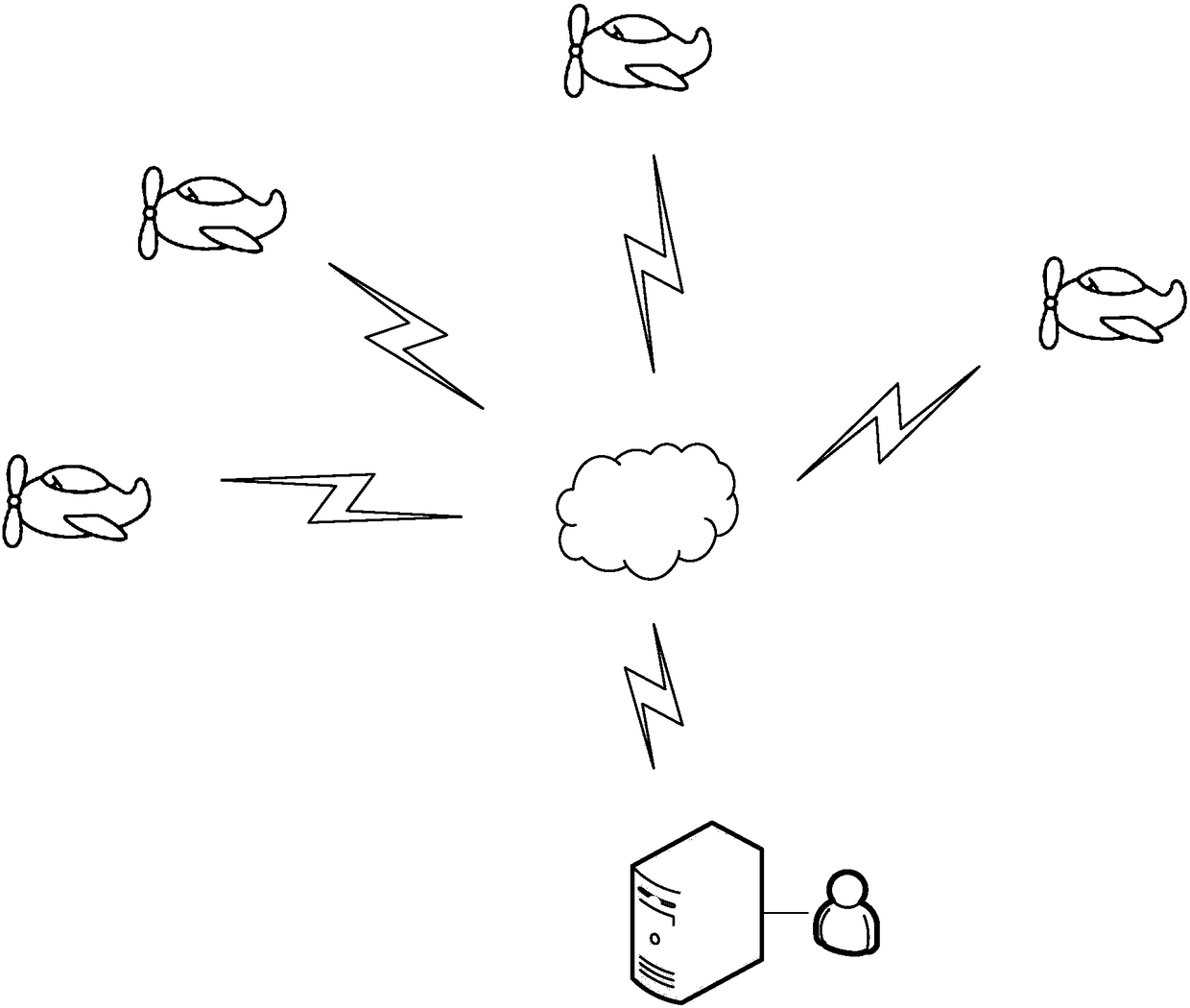
[0060] Determine the control area of the host device; enable multiple drones in the area to be controlled by the host device;
[0061] Each of the drones includes identity information, route information and route calculation complexity information;
[0062] When the UAV detects another UAV within a certain range of its location, send the identity information, route information and route calculation complexity information to the host device;
[0063] When the UAV receives the re-planned route information sent by the host device, it executes a flight action at the next location.
[0064] Wherein, the host device can be a fixed server or a mobile remote control device, and the number of the drone devices is at least two, usually several or dozens of devices. In such a complex environment, Fast-moving drones can often coll...
Embodiment 2
[0088] In addition, according to a specific embodiment of the present invention, there is also provided a UAV anti-collision control method, including the following steps:
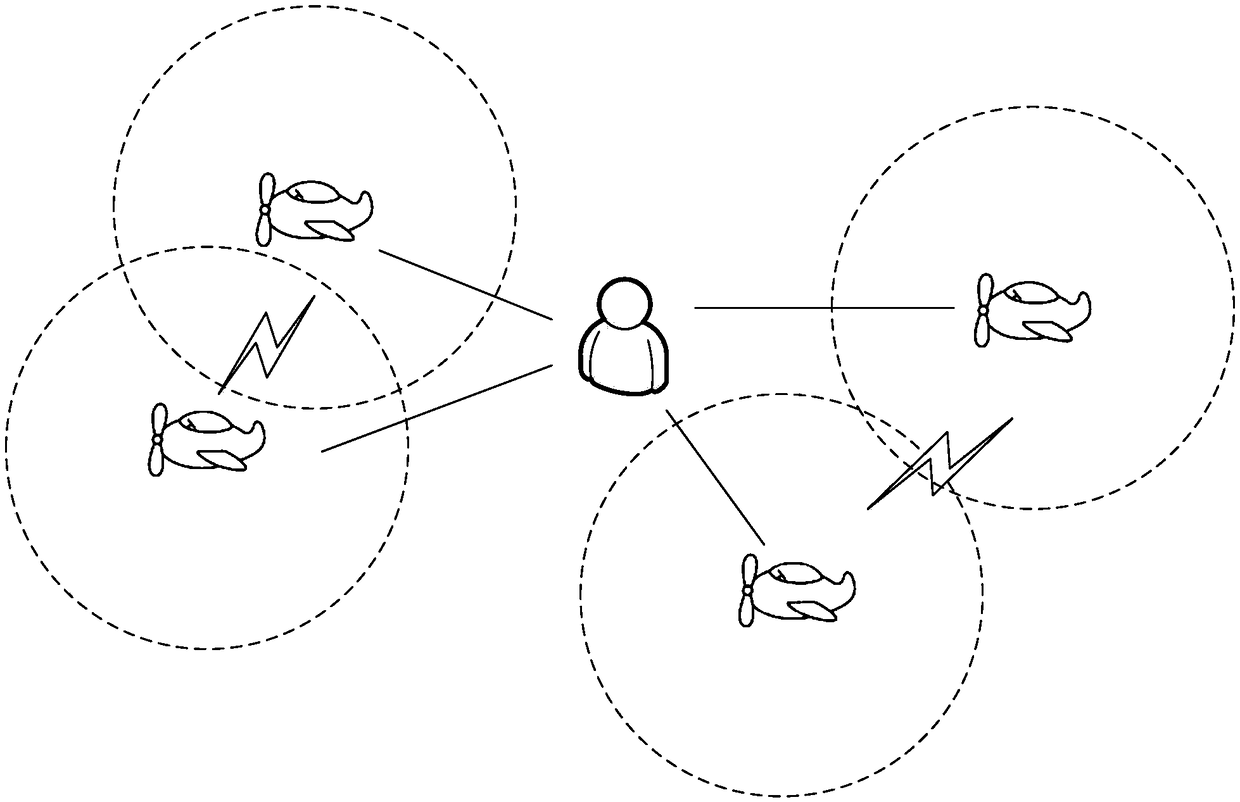
[0089] The drone monitors other drone devices within a certain range around it in real time;
[0090] When the drone detects that there is another drone within a certain range of its location, send the identity information, route information, route calculation complexity information, and backup route plan information to the other drone, Simultaneously receive the identity information, route information, route calculation complexity information and backup route plan information of the other UAV;
[0091] Determine whether the route information of two drones overlaps;
[0092] If there is no overlap, return to execute the original route information command;
[0093] If overlap occurs, re-plan the flight route of each drone, and return to execute the new planning route command.
[0094] Wherein, the number...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The present invention relates to an unmanned aerial vehicle anti-collision control method. The method comprises the steps of: determining a control area of a host; allowing unmanned aerial vehicles inthe area to receive control of a host device, each unmanned aerial vehicle comprises identity information, route information and route calculation complexity information; when the unmanned aerial vehicles detect there is another unmanned aerial vehicle in a certain range at the positions where the unmanned aerial vehicles are located, sending the identity information, the route information and the route calculation complexity information to the host device; and when the unmanned aerial vehicles receive the replanning route information sent by the host device, executing the flight motion at the next position. The unmanned aerial vehicle anti-collision control method employs the host to calculate and command a new flight route and performs centralized control to avoid generation of danger of collision of unmanned aerial vehicles. Or the unmanned aerial vehicle anti-collision control method allows the unmanned aerial vehicles to directly send their own next routes and the route calculation complexities to one another and allow the unmanned aerial vehicles to respectively combine the received opposite-side routes and their own routes for determination to avoid collision. The whole control method is good in implementation effect in a complex environment.
Description
technical field [0001] The invention relates to the technical field of unmanned aerial vehicles, in particular to an anti-collision control method for unmanned aerial vehicles. Background technique [0002] Existing consumer drones often require multiple drones to work together in public places, densely populated and complex building environments, and in this working environment, it is necessary to ensure the flight of multiple drones Safety, that is, while ensuring the operation experience and smooth flight, it is also necessary to ensure that multiple (several or dozens) drones avoid collisions with each other, which puts forward higher requirements for the automatic collision avoidance control of drones. Therefore, in the long-term research process, the researchers of the present invention have explored a technical solution that can realize the free and safe flight of multiple unmanned aerial vehicles in a complex environment. Contents of the invention [0003] An embo...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More