

Three-dimensional track intelligent planning method for underwater autonomous vehicle
An autonomous vehicle, intelligent planning technology, applied in three-dimensional position/channel control, navigation calculation tools, etc., can solve the problems of algorithm sacrificing algorithm optimization accuracy and optimization efficiency, comprehensive consideration, and the fact that the track cannot be really used for actual tasks, etc. Achieve the effect of overcoming long convergence time, improving search efficiency, and overcoming easy to fall into local optimum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
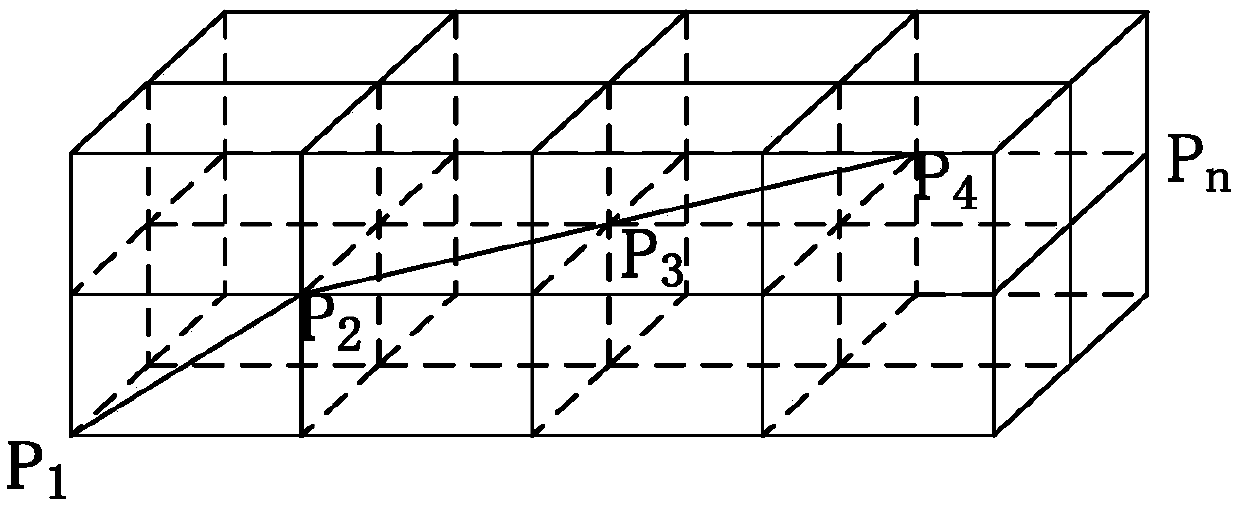
[0093] 1. Seabed terrain simulation
[0094] Track planning necessarily requires the knowledge of the seabed topography information of the navigation area. The invention adopts the method of combining random terrain simulation and mountain topography simulation to simulate the terrain of track planning.
[0095] The seafloor topography can be decomposed into two components in the height direction, the first is the height of the topographic reference plane that produces the average height of the topography, and the second is the topographic relief superimposed on the topographic reference plane:
[0096] H(x,y)=H 0 +Z(x,y) (1)
[0097] Among them, H(x,y) is the actual altitude of the coordinate (x,y) point; H 0 is the average height of the whole area; Z(x,y) is the terrain relief height based on the average terrain height. The fluctuation algorithm for the actual terrain is characterized by a random sequence of Gaussian distribution, and the correlation of terrain sampling ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More