

Method for selecting taking-off and landing point for fixed-wing unmanned aerial vehicle in urban area
A fixed-wing, aircraft city technology, applied in the field of UAV aerial survey, can solve the problems of urban environment without special classification processing, the UAV deviates from the predetermined landing point, and the take-off and landing point takes a lot of time, so as to reduce the aerial survey. cost, ensuring safe take-off and landing, and good control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Specific examples are given below to further describe the technical solution of the present invention in a clear, complete and detailed manner. This embodiment is the best embodiment on the premise of the technical solution of the present invention, but the protection scope of the present invention is not limited to the following embodiments.
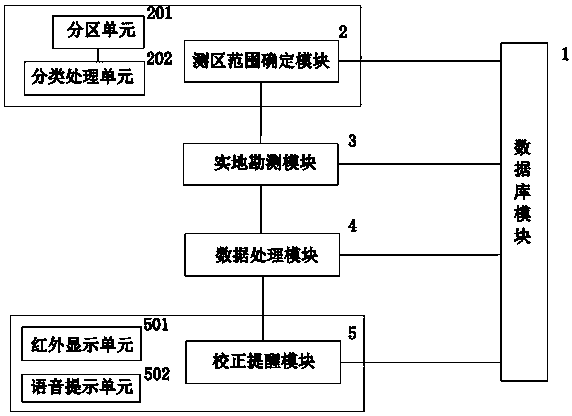
[0039] The method for selecting take-off and landing points in urban areas of fixed-wing unmanned aerial vehicle of the present invention, such as figure 1 As shown, the selection system used in this selection method includes a database module 1, and also includes a sequentially connected survey area range determination module 2, field survey module 3, data processing module 4 and correction reminder module 5, the survey area range determination module 2 , field survey module 3, data processing module 4, correction reminder module 5 are connected with described database module 1 respectively;
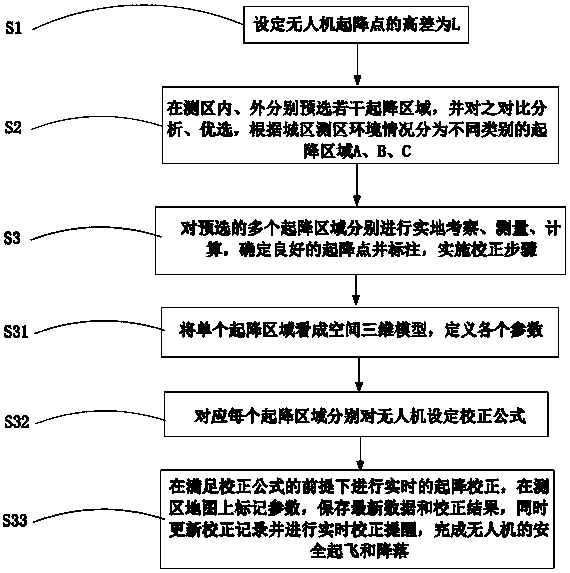
[0040] like figure 2 As shown, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More