

Path planning method for unmanned vehicle under structured environment
An unmanned vehicle and path planning technology, applied in vehicle position/route/altitude control, road network navigator, two-dimensional position/channel control, etc., can solve the behavior of vehicles behind without consideration, traffic accidents, Consider issues such as traffic signs for unmanned vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention will be described in further detail below in conjunction with the accompanying drawings.
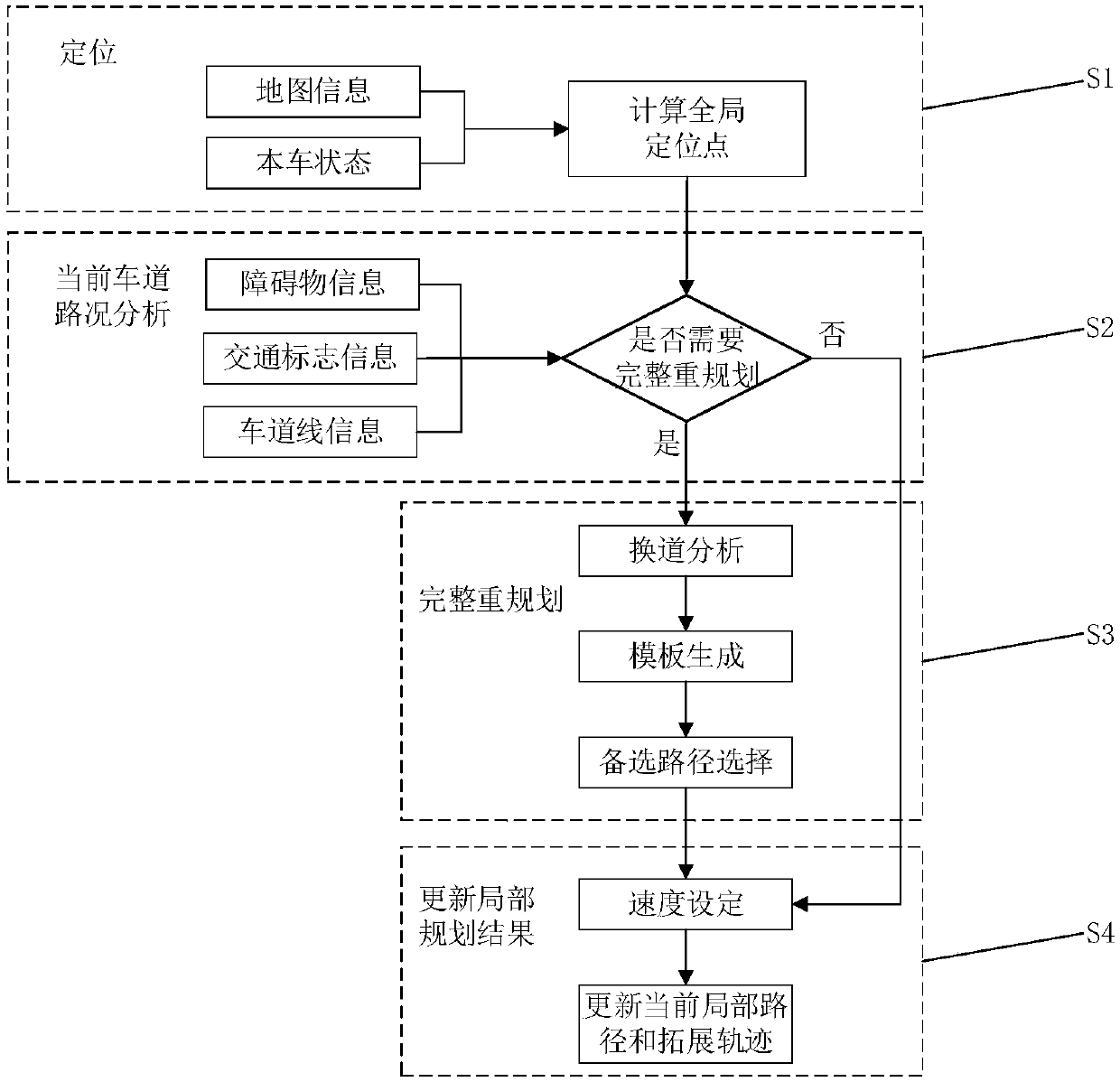
[0084] Such as figure 1 As shown, a path planning method for unmanned vehicles in a structured environment includes the following steps:
[0085] Step S1, positioning. Specifically, such as figure 1 As shown in the first dotted box, the following sub-steps are included:
[0086] Step S101, obtaining global map information and vehicle status information;
[0087] Specifically, the global map information includes the coordinates of the path point (x i ,y i ), i∈N, traffic sign information; the vehicle status information includes the coordinates of the unmanned vehicle (x c ,y c ), speed V c , acceleration a c , towards the rate of change θ c ’, toward θ c .
[0088] Step S102, calculating the global positioning point;
[0089] Specifically, calculate the coordinates of the vehicle (x c ,y c ) to each global path point coordinate (x i ,y i ), fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More