

Control system and method for AGV trolley
A technology of control system and control method, applied in control/regulation system, vehicle position/route/height control, non-electric variable control, etc. High efficiency, easy to implement and stable parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further explained and described below in conjunction with the accompanying drawings and specific embodiments of the description.
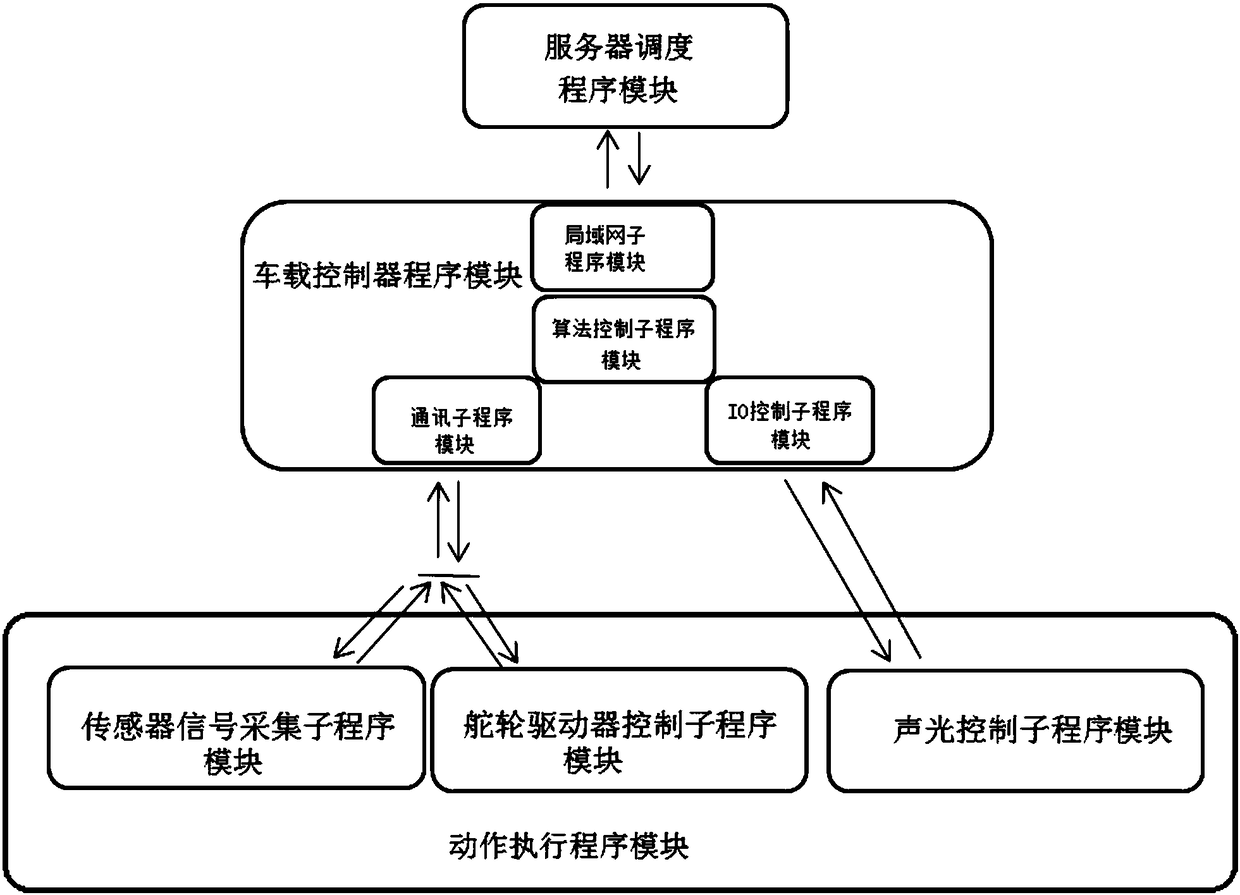
[0046] refer to figure 1 , the AGV trolley control system of the present invention comprises:
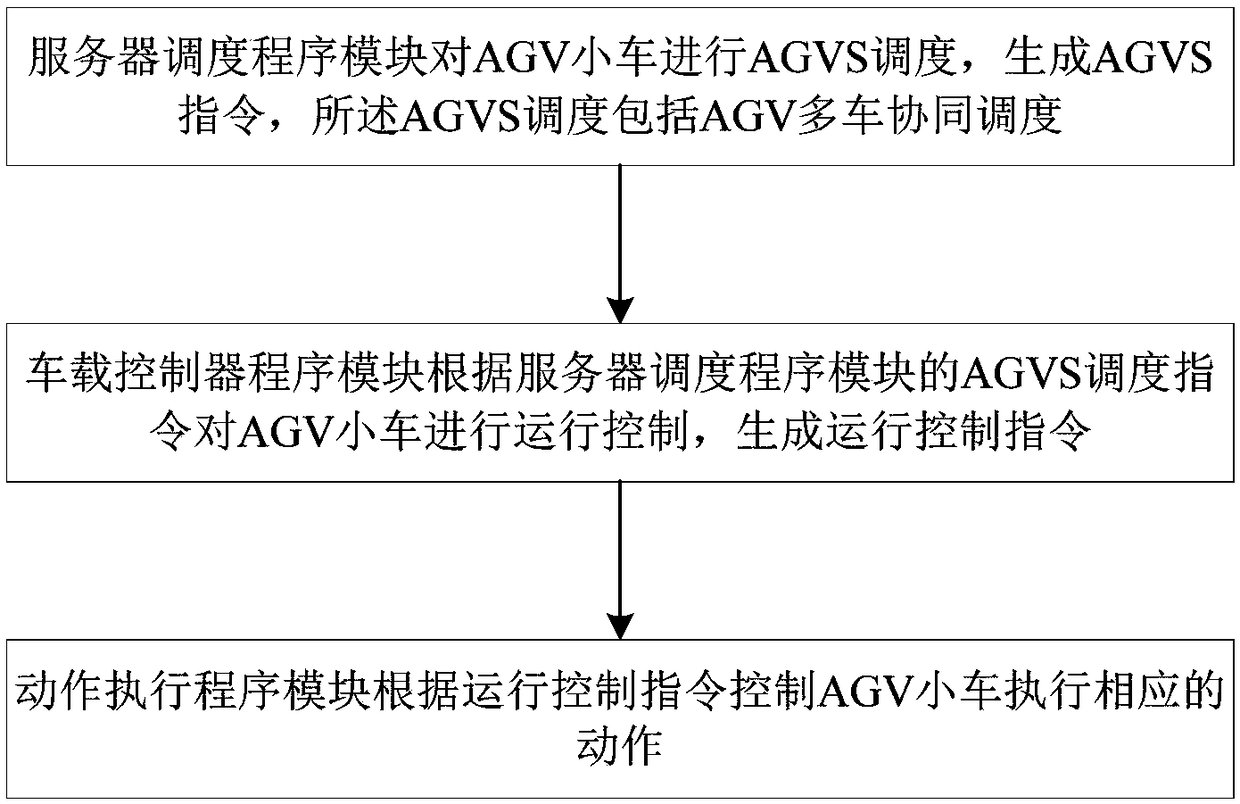
[0047] The server scheduler module is used to carry out AGVS scheduling to the AGV trolley, and the AGVS scheduling includes AGV multi-vehicle coordinated scheduling;
[0048] The on-board controller program module is used to control the operation of the AGV trolley according to the AGVS scheduling instruction of the server scheduler module, and the operation control includes using a parabola-based magnetic navigation tracking algorithm to obtain the position offset and steering wheel direction of the magnetic navigation speed;
[0049] The action execution program module is used to control the AGV car to perform corresponding actions according to the operation control instructions of the on-board controller program...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More