

A tightening manipulator for a self-returning c-groove precision screw tightening robot
A C-shaped groove and robot technology, applied in metal processing equipment, metal processing, manufacturing tools, etc., can solve the problems of easy slippage and small torque, and achieve the effect of preventing slippage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the implementation scope of the present invention is not limited thereto.
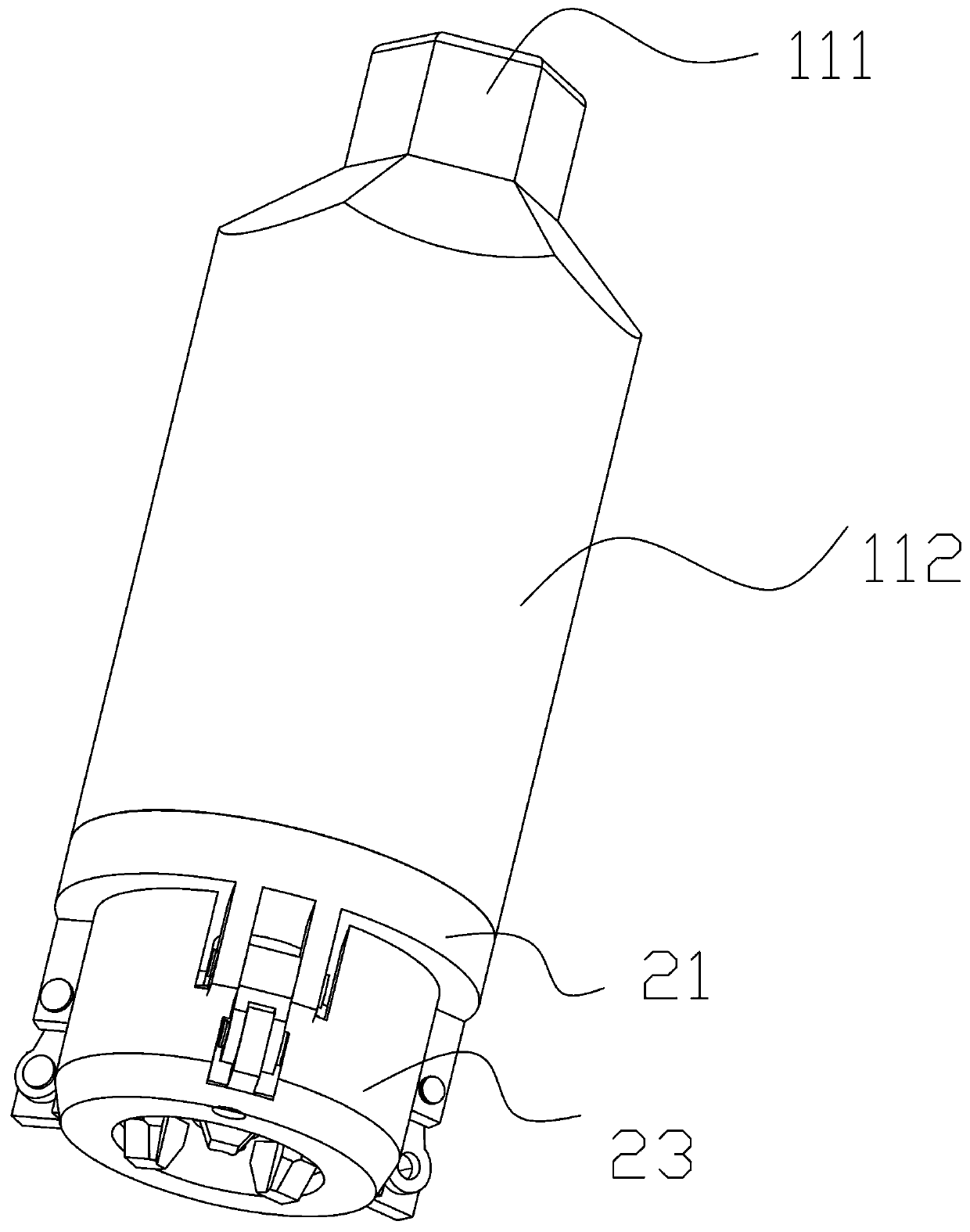
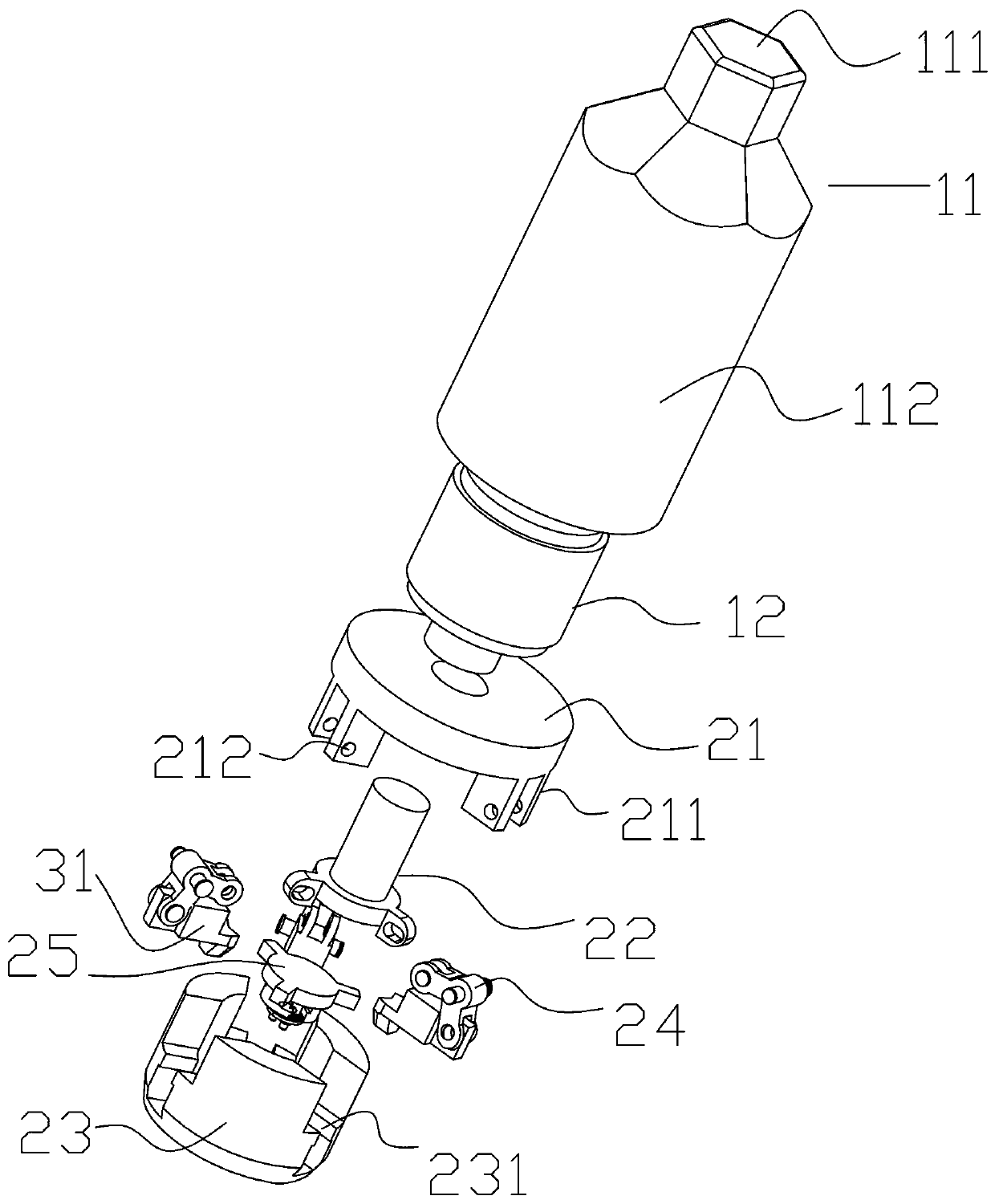
[0025] Such as Figure 2 to Figure 10 As shown, the tightening manipulator for a self-returning C-groove precision screw tightening robot described in this embodiment includes a force supply device and a centrifugal clamping mechanism;
[0026] The power supply device includes a connecting cylinder 11 and an electromagnet 12, the connecting cylinder 11 is used to fix the electromagnet 12, the electromagnet 12 is located in the connecting cylinder 11, and the electromagnet 12 includes a silicon steel frame in the form of an I-shaped wheel, a winding and an iron core, the iron core passes through the inner hole of the silicon steel frame, the winding is used to generate a magnetic field, and the winding is wound on the silicon steel frame, so The iron core is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More