

Wall Walking Mechanism and Wall Climbing Robot
A walking mechanism and wall technology, applied in the field of robots, can solve the problems of the robot's steering flexibility, movement speed and ability to cross obstacles, etc., to achieve the effect of fast continuous walking, improve the ability to cross obstacles, and ensure stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with embodiment, but is not limited to the content on the description.
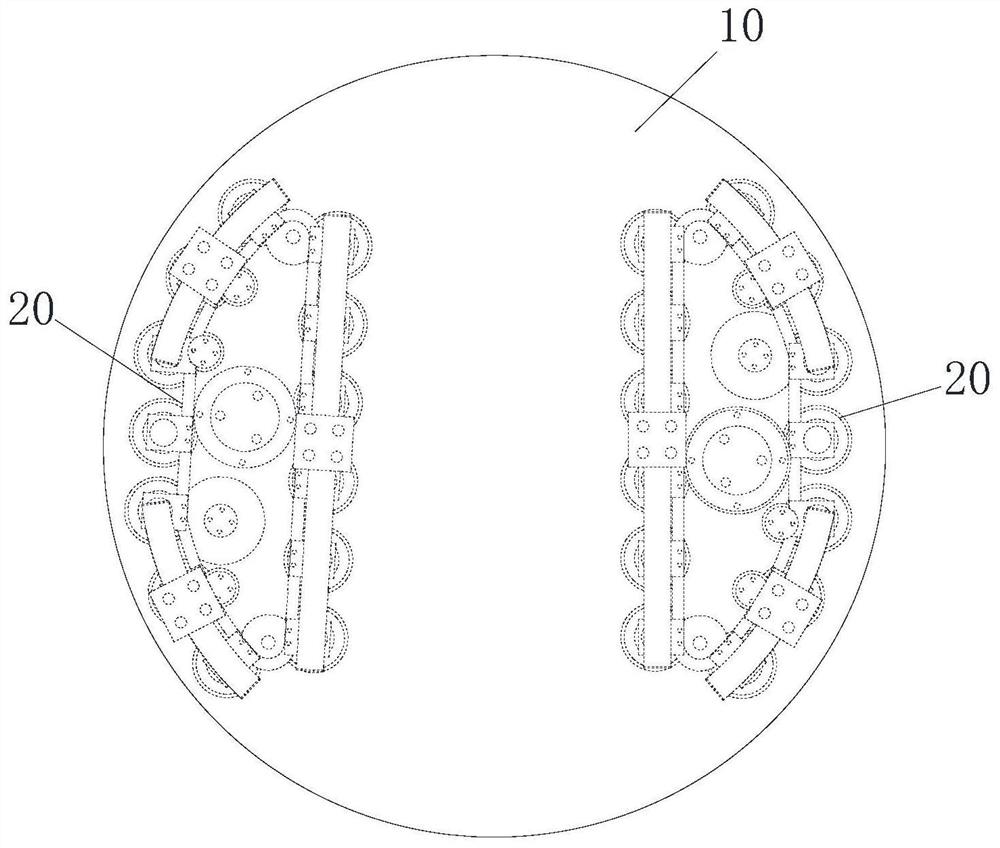
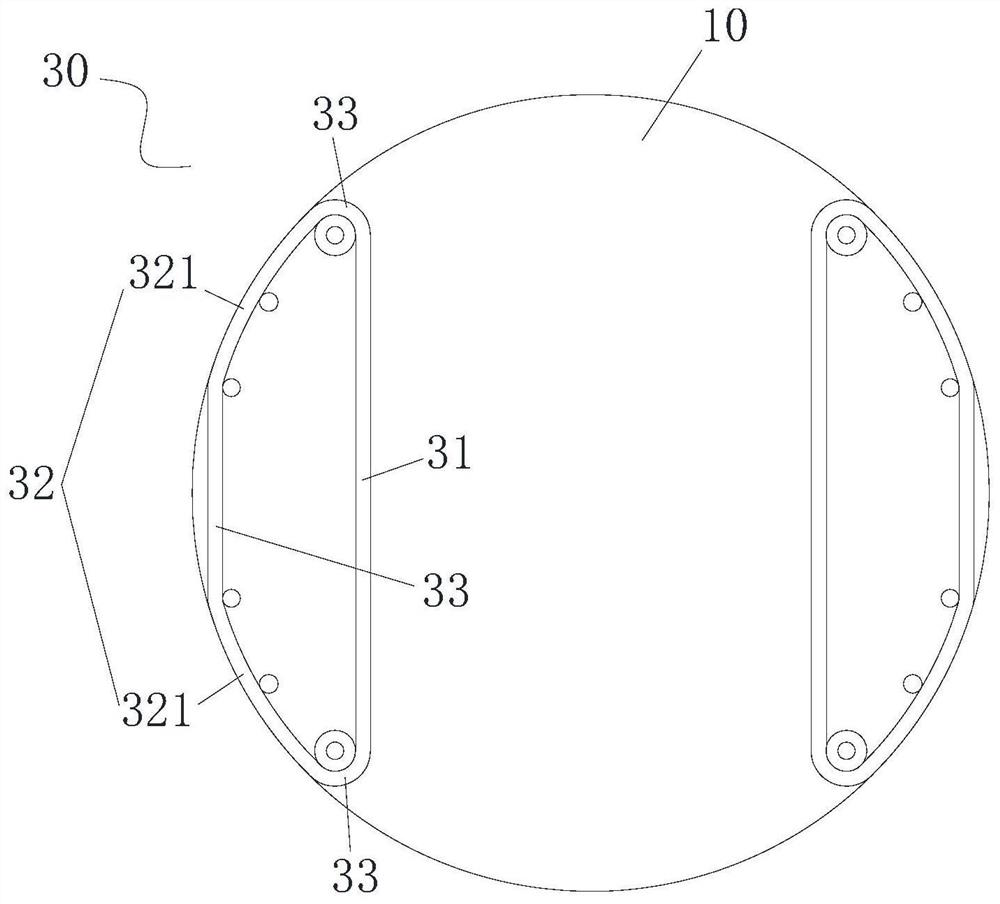
[0043] The invention discloses a wall walking mechanism, comprising: a base 10 and a motion mechanism 20, the motion mechanism 20, the motion mechanism 20 is arranged on the base 10, the motion mechanism 20 includes a driving device 21 and a suction cup 22, and there are a plurality of suction cups 22, and A plurality of suction cups 22 are arranged at intervals on the driving device 21, and the driving device 21 drives the suction cups 22 to move, and the displacement track of each suction cup 22 forms a closed curve 30; the closed curve 30 has a straight line segment 31, an arc segment 32 and a connecting segment 33, The two ends of the straight section 31 are respectively connected to the two ends of the arc section 32 through the connecting section 33; the motion mechanism 20 has a linear motion state and a rotational state. O...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More