

A Smooth Interpolation Method for Mobile Robot Velocity
A mobile robot and interpolation method technology, applied in the field of mobile robots, can solve problems such as vehicle body jitter, avoid violent start and stop, improve motion performance, and have obvious interpolation effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] In this embodiment, in order to overcome the need to judge the acceleration and deceleration process by calculating the number of motor pulses in the existing curve speed control method, and for the mobile robot, since the transmission of the control speed is based on the center coordinate system of the car body, there is no device that can provide The problem with the number of pulses mentioned above. Therefore, a method for smooth interpolation of mobile robot speed is proposed, specifically, the method includes the following steps,
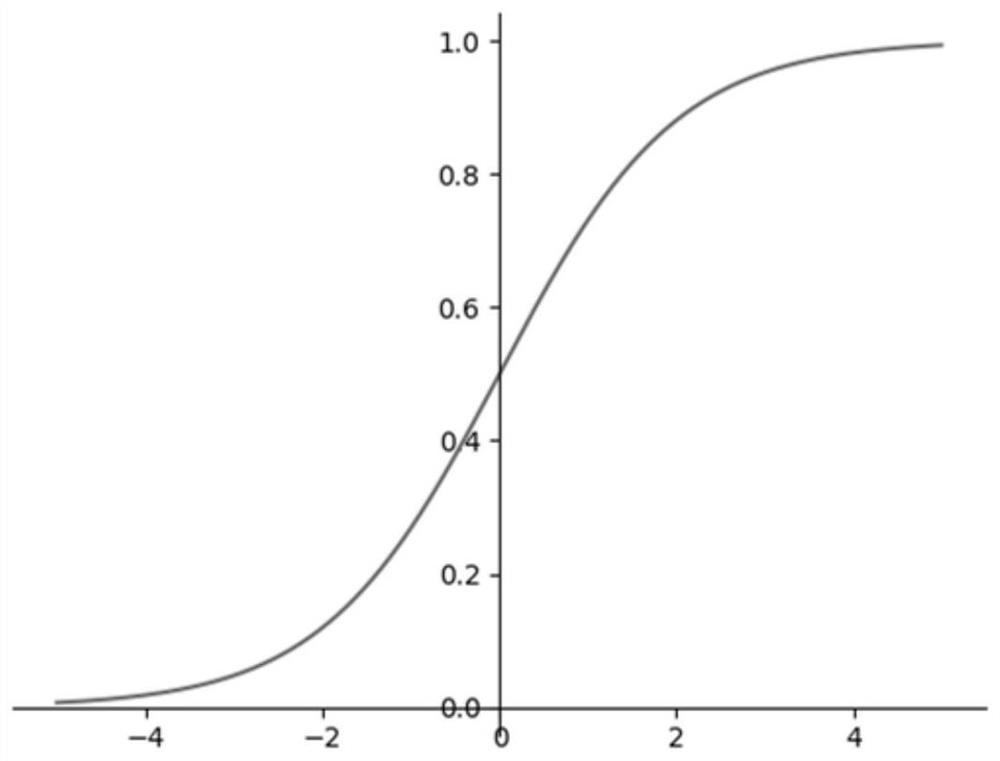
[0042] (1) Establish an interpolation function model;
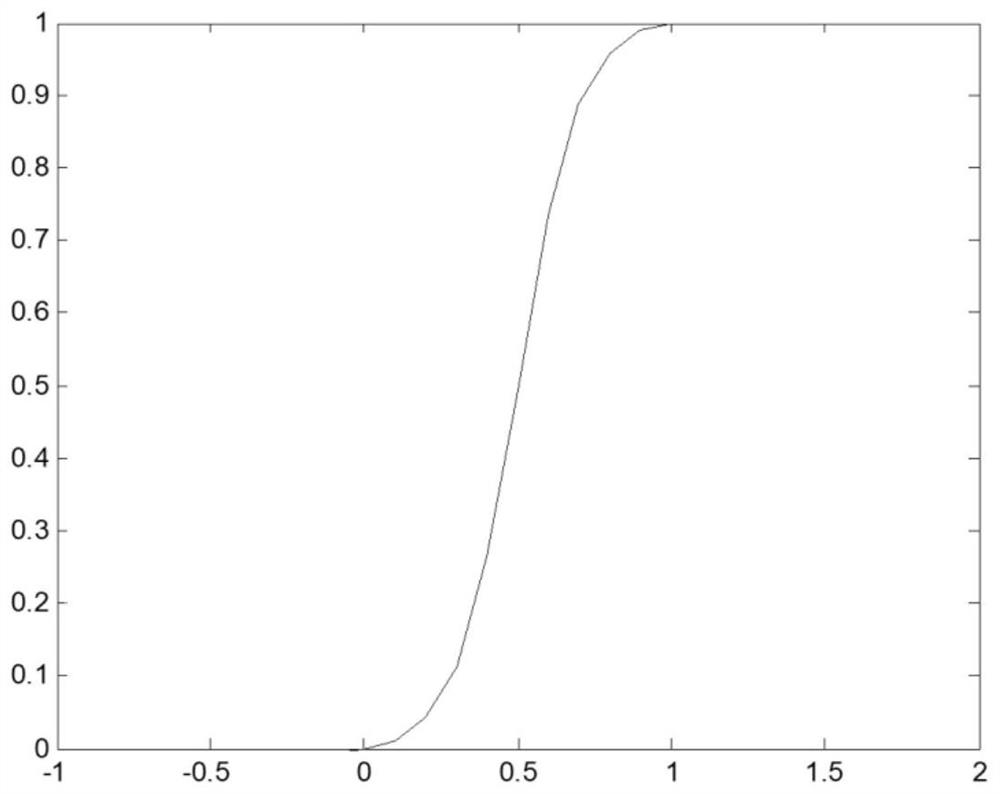
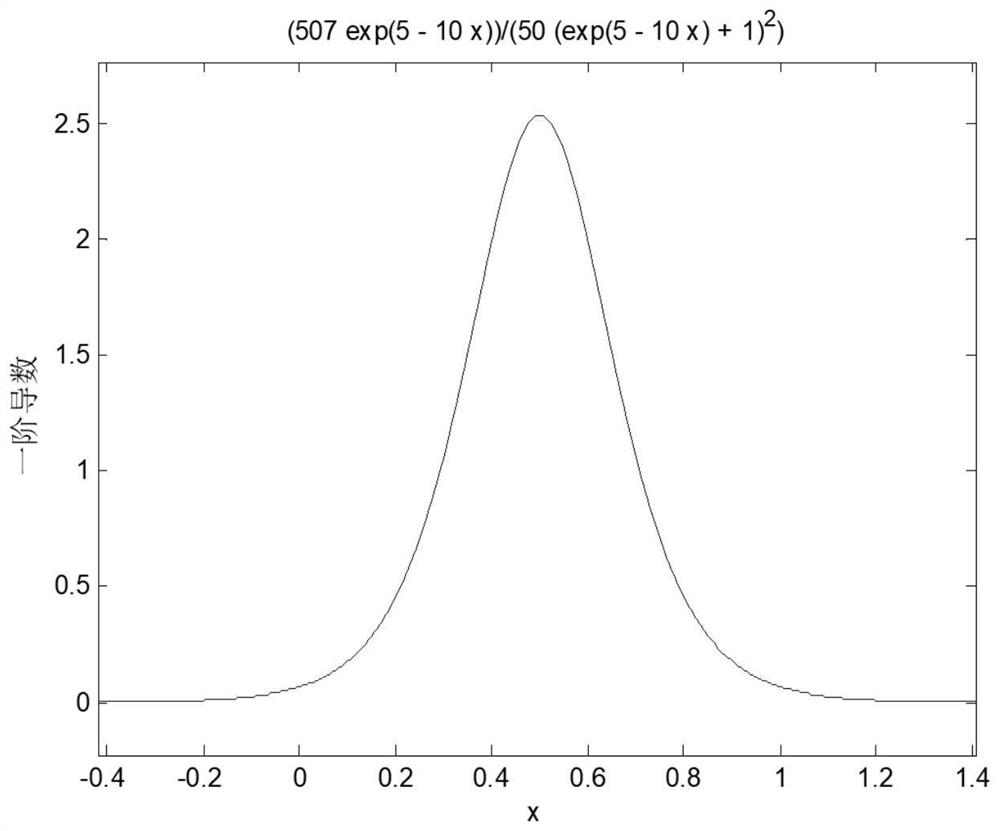
[0043] (2) Optimizing the interpolation function model to obtain the speed control curve model;
[0044] (3) combining the optimized speed control curve model with the current state of the mobile robot to obtain the required control quantity model of the motor;
[0045] (4) Calculate the interpolation amount that can be selected in advance according to the control frequency of diffe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More