

Control system and control method for rotary positioning platform under microscope
A positioning platform, a technology under the microscope, applied in the field of microscopy, can solve the problems of large displacement change of the sample, failure of sample imaging and operation, fluctuation of radial displacement of the sample, etc., to improve the accuracy of rotation positioning and improve the effect of microscopic imaging.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention. In addition, it should be noted that, for the convenience of description, only some structures related to the present invention are shown in the drawings but not all structures.
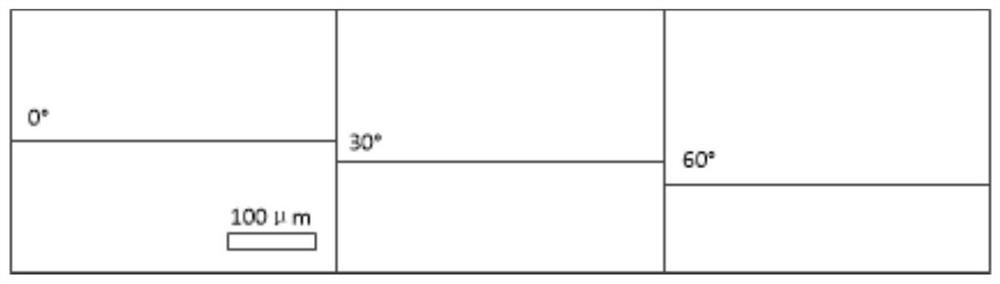
[0045] Microscopes can already observe samples at the micro-nano scale. Due to the high requirements for the operation and control precision of samples under the microscope at the micro-nano scale, it is necessary to study the operating system with micro-nano precision. At present, for samples with linear motion, there are already many operating systems that can achieve micro-nano precision operations. However, for the observation of rotating samples, there is no operating system with micronano precision that can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More