Four-rotor aircraft with wall surface landing and take-off function
A four-rotor aircraft, functional technology, applied in the direction of aircraft, rotorcraft, landing gear, etc., can solve the problems of large overturning moment, small overturning moment, center of gravity far away from the wall, etc., and achieve good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
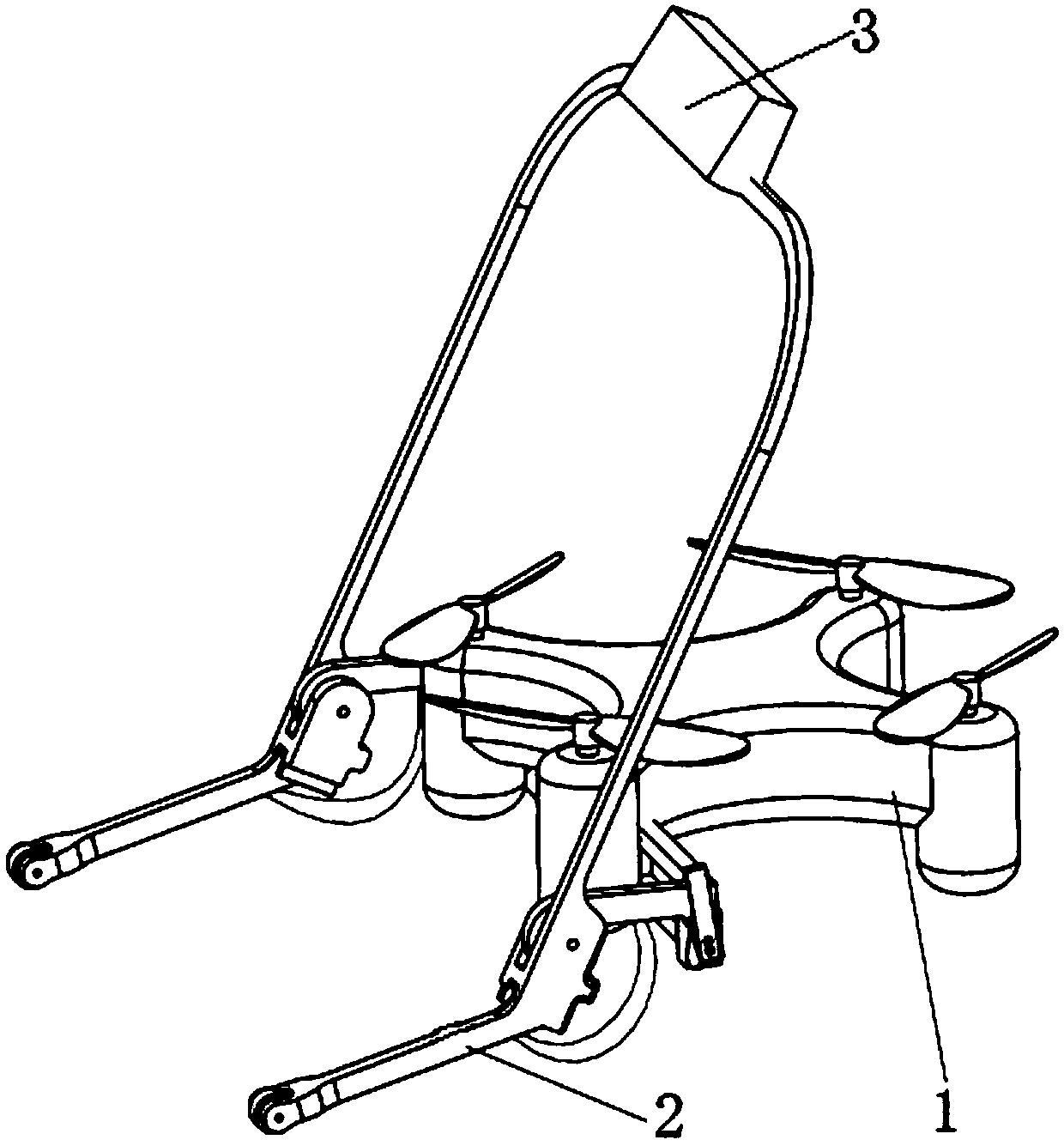
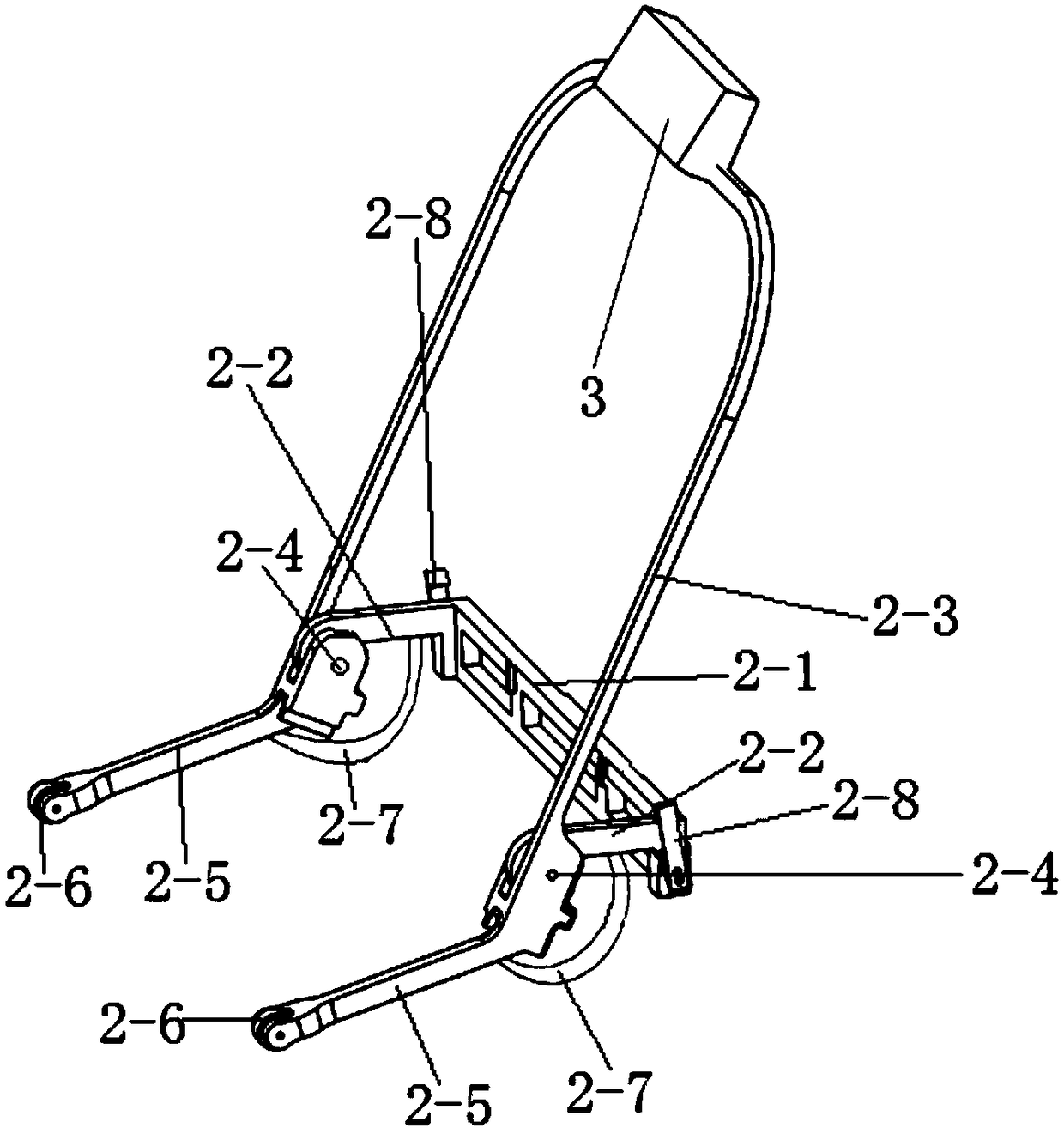
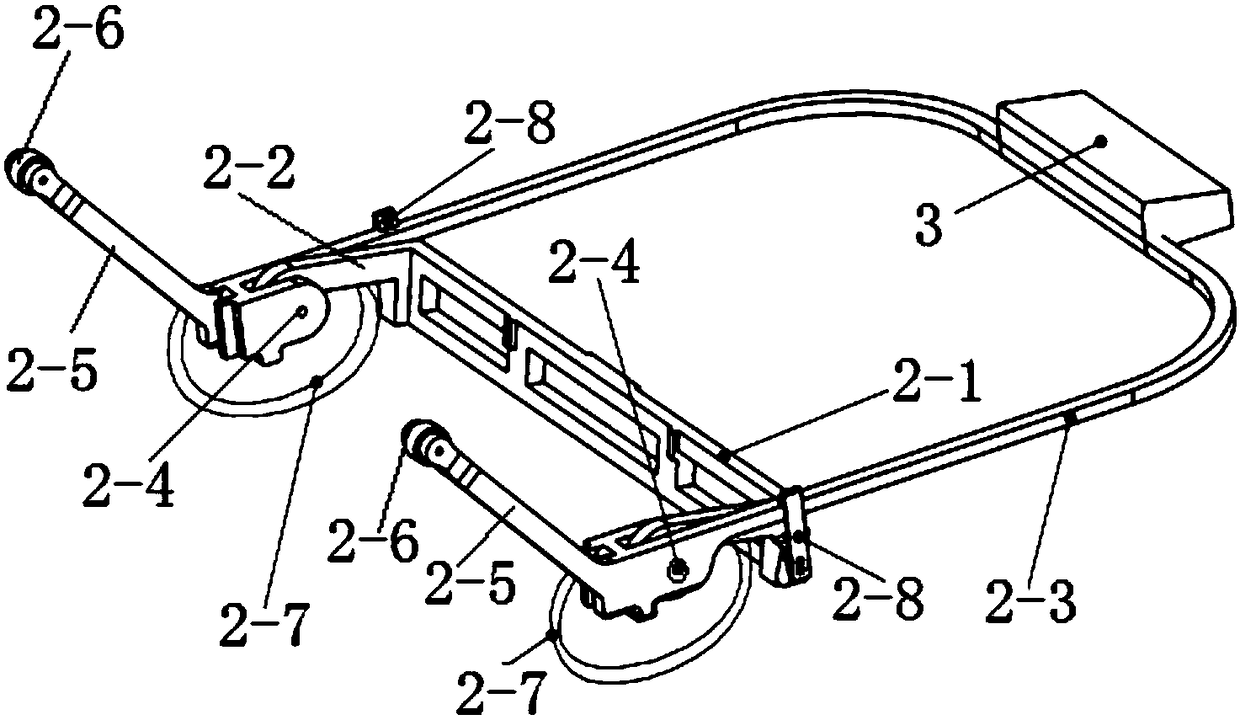
[0029] The present invention is a four-rotor aircraft with wall landing and take-off functions, such as Figure 1~3 As shown, the rotorcraft body is included, and the rotorcraft body 1 is connected with a landing gear 2, and the landing gear 2 includes a connecting frame 2-1, and the two ends of the connecting frame 2-1 are respectively connected to the U-shaped landing gear through a strut 2-2. 2-3, the two side stop ends of the landing gear 2-3 are respectively connected to one end of the strut 2-2 through the rotating shaft 2-4, and the two side stop ends of the landing gear 2-3 are also respectively connected to the legs One end of the 2-5, the other end of the support leg 2-5 is provided with a skid wheel 2-6, and the cross bar of the landing gear 2-3 is provided with an adhesion mechanism 3, and the connection between the landing gear 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More