

Monocular camera and inertial measurement unit relative mounting angle calibrating method
A technology of inertial measurement unit and calibration method, which is applied in the field of sensor calibration, can solve problems such as calibration without support, and achieve the effects of avoiding calibration errors, simple equipment, and saving the preparation time in the early stage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
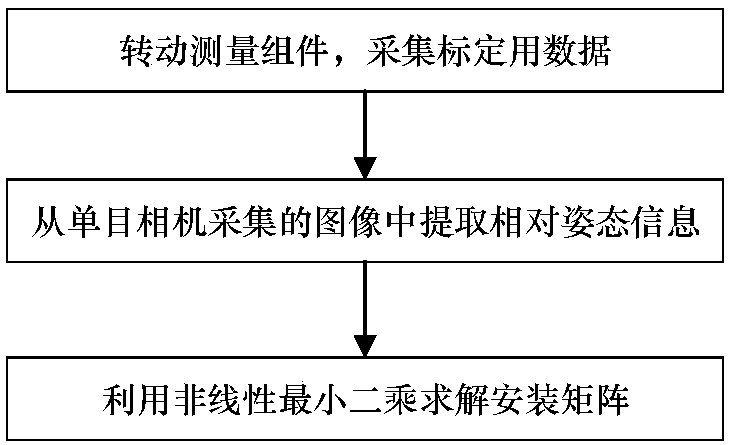
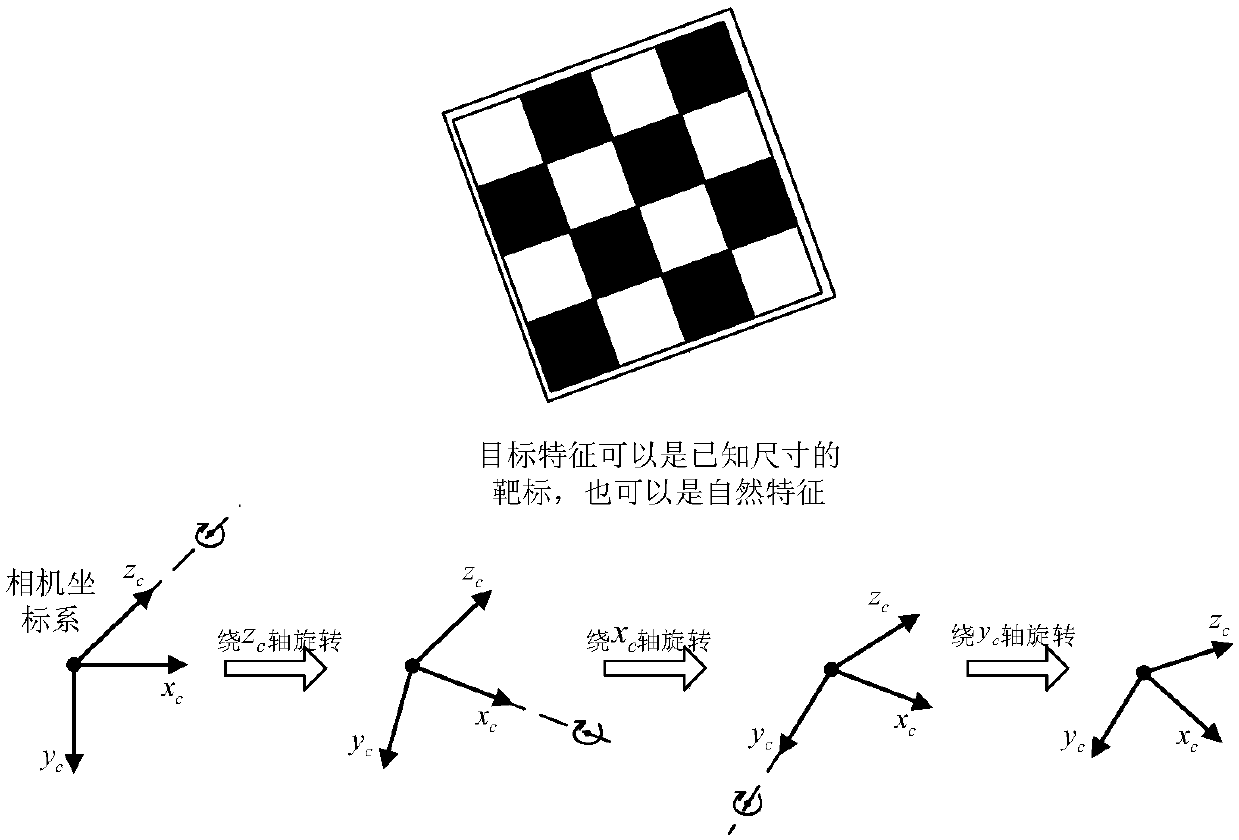
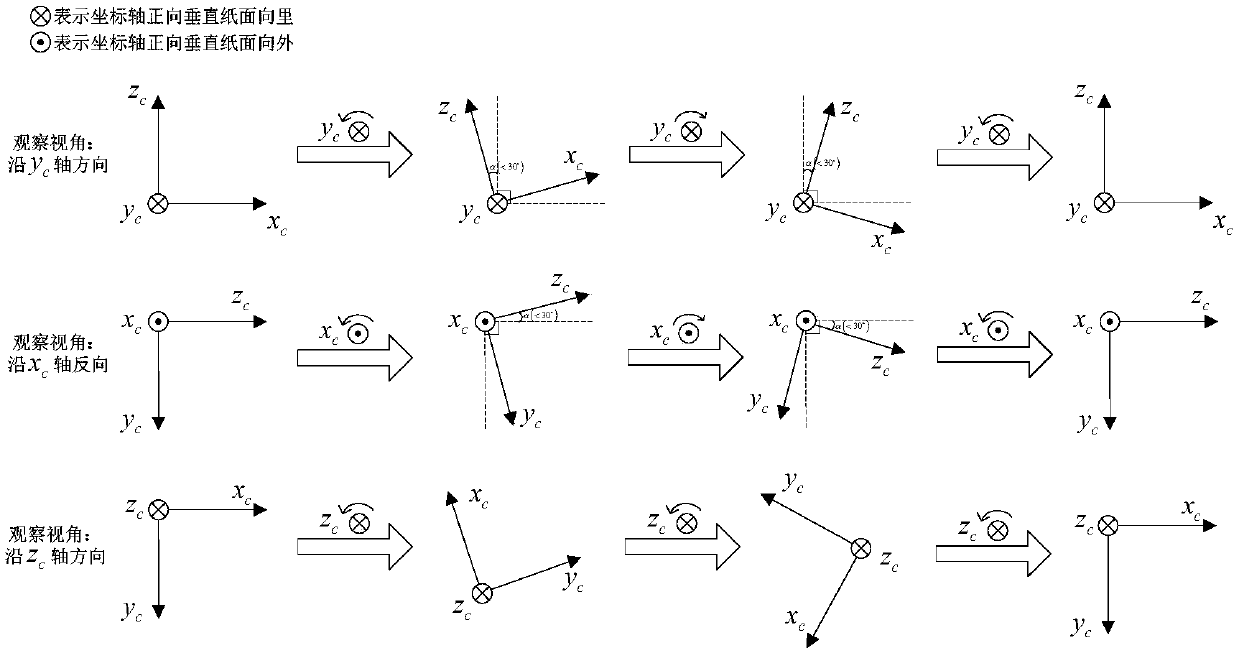
[0021] In the existing monocular camera and IMU measurement components, the relative installation angle calibration method of the two needs to measure absolute reference information, and these absolute reference information either need to be arranged in advance, or need to be measured with higher precision, which leads to the preparation The time is long, the cost is high, and the calibration result is easily affected by the measurement error of the absolute reference information. In order to solve the above technical problems, the present invention proposes a relative installation angle nonlinear optimization calibration method that only relies on relative attitude measurement, provides several rotation modes that should be adopted in the calibration process, and proposes that the nonlinear least squares method requires the minimum S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More