

Telecentric lens external parameter calibration method based on normal vector
A technology of telecentric lens and calibration method, which is applied in the field of normal vector-based external parameter calibration of telecentric lens, which can solve the inconvenience of the calibration process, the error of calibration results, and the inability to determine the positive and negative of the pitch angle and roll angle in the Euler angle of the external parameters Number and other issues, to achieve the effect of improving calibration accuracy and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. The present invention is not limited to this embodiment, and other embodiments may also belong to the scope of the present invention as long as they conform to the gist of the present invention.
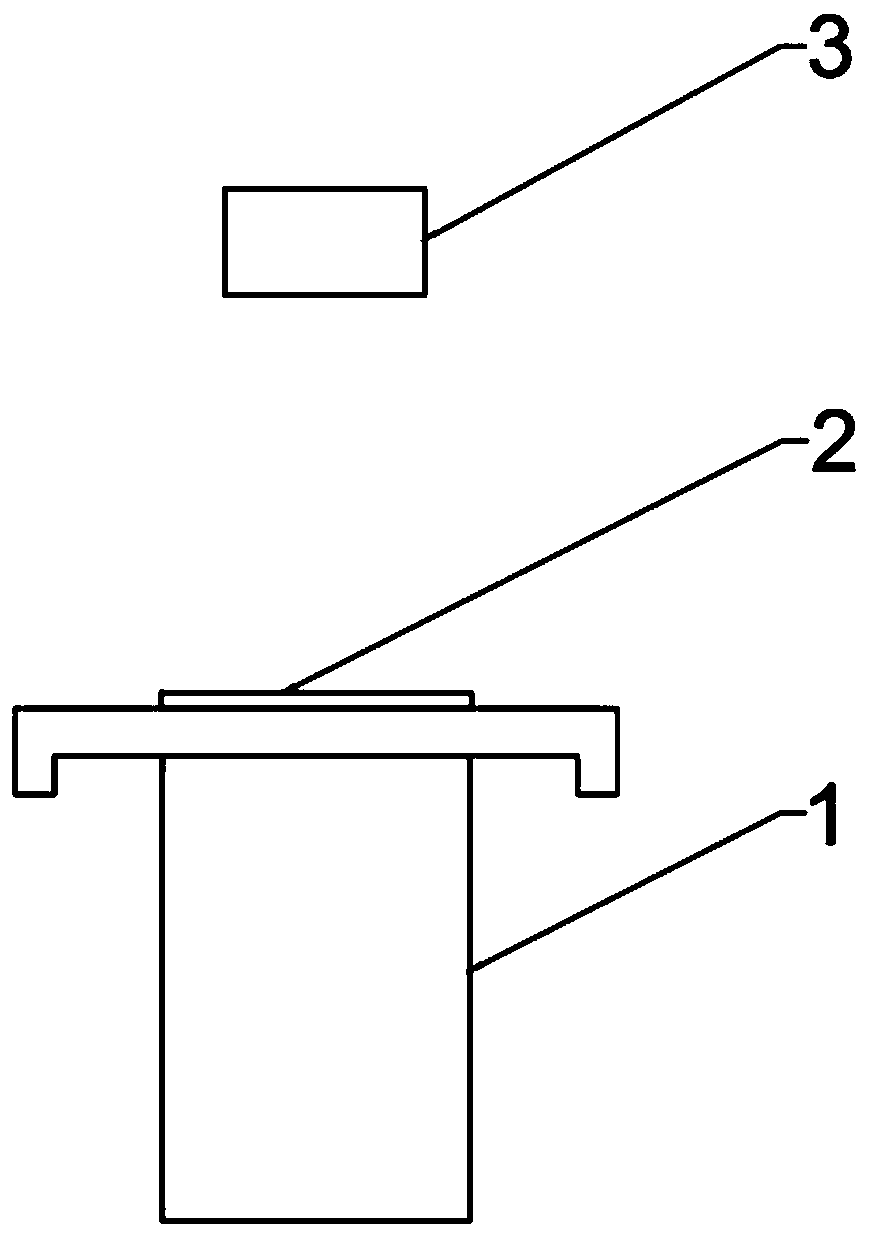
[0064] In a preferred embodiment of the present invention, based on the above-mentioned problems existing in the prior art, a method for calibrating external parameters of a telecentric lens based on a normal vector is now provided, such as figure 1 As shown, a displacement platform 1 that can be adjusted in height in the vertical direction is set in advance, and a plane calibration plate 2 placed on the displacement platform 1 is arranged in advance, and a telecentric lens 3 is arranged on the top of the plane calibration plate 2 to align the distance The external parameters of the heart lens 3 are calibrated;
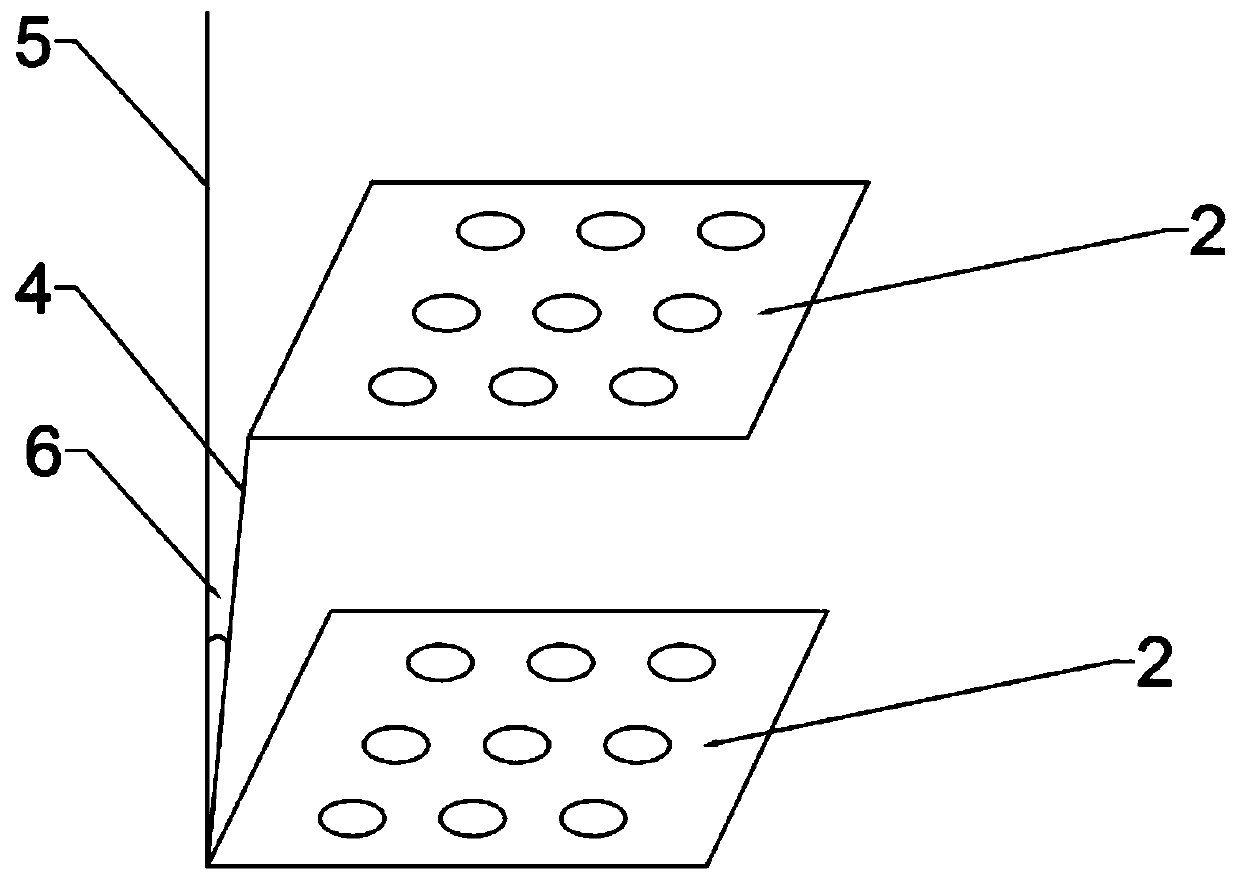
[0065] Such as figure 2 As shown, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More