Movement control method for quadruped robot based on central pattern generator
A pattern generator and robot motion technology, applied in the field of bionic robots, can solve problems such as the inability to control the robot's footprint factor, motion frequency and gait independently, and achieve the effect of smooth motion and smooth switching process.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
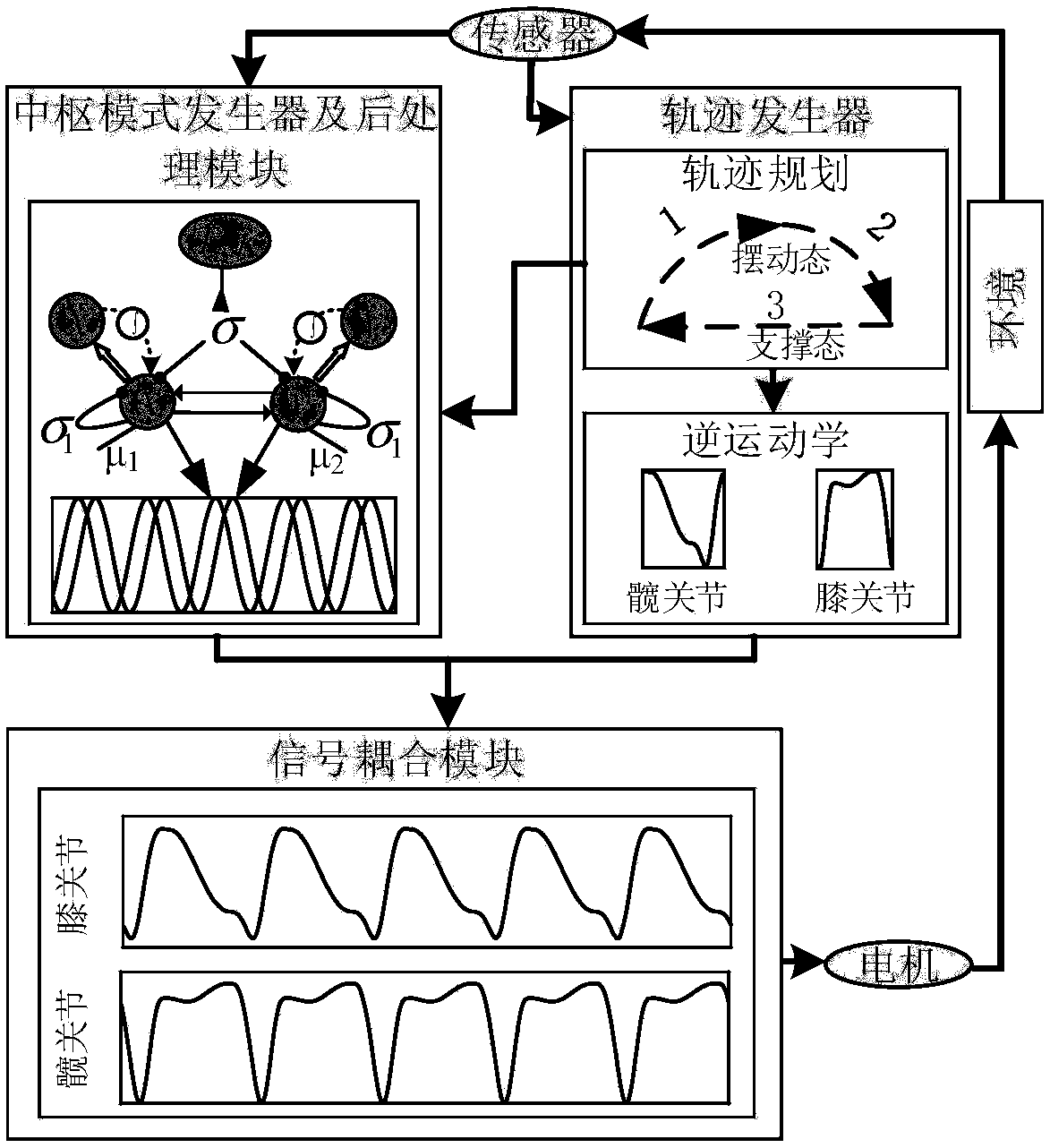
[0032] Such as figure 1 As shown, this embodiment provides a motion control method for a quadruped robot based on a central mode generator, including foot end trajectory planning, which includes foot end trajectory in a swing state, foot end trajectory in a support state, and foot end trajectory planning. relative to the root joint trajectory;
[0033] In this embodiment, the initial position and velocity of the foot end of the robot relative to the root joint are known, as well as the expected target position, speed, and intermediate position of the robot, and a quartic spline curve is used to plan the trajectory of the robot, that is, the foot end in the swing state The trajectory formula is:
[0034]
[0035] Restrictions:
[0036]
[0037] The foot trajectory obtained in the swing state is as formula (1):
[0038]
[0039] In formula (1), x is the control signal, x∈[-1,1]; s is the step size, h is the maximum leg height of the walking robot, v 0 is the average...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More