

Robot positioning method, device and equipment and storage medium
A technology for robot positioning and robotics, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as inaccurate positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
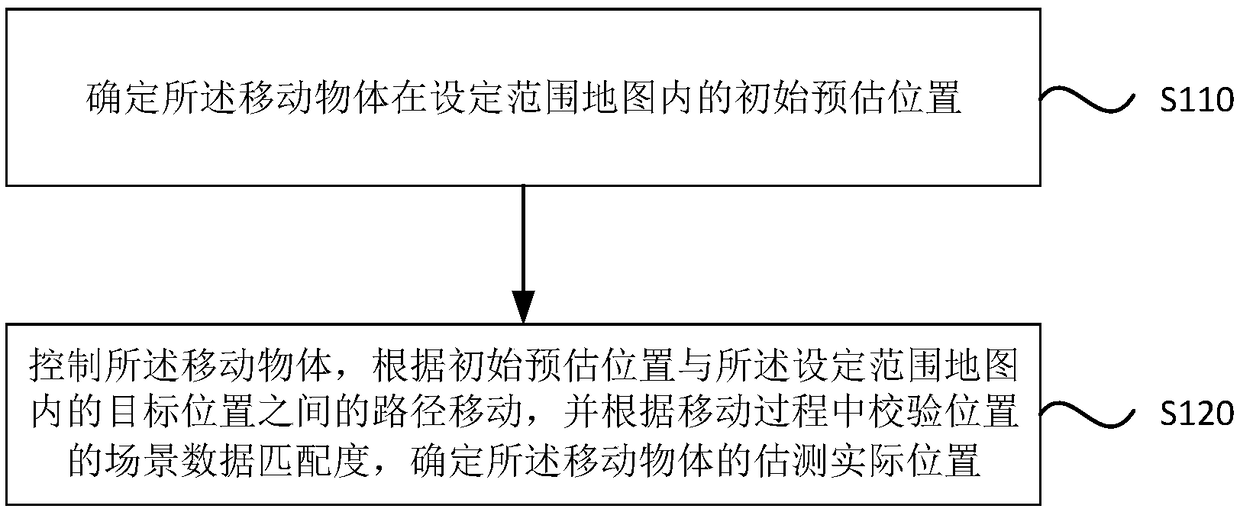
[0053] figure 1 It is a flow chart of a robot positioning method provided in Embodiment 1 of the present invention, the method is executed by a robot positioning device, the device can be executed by software and / or hardware, and the device can be configured in a positioning device, Wherein, the positioning device may be a robot, or other devices other than the robot that control the robot, for example, it may be a terminal, a server, etc., and the terminal may be a smart phone, a tablet computer, or the like. The server can be a cloud server or other types of servers. Among them, the robot can be a service robot, a commercial robot, etc., and the commercial robot can work in an environment with a large space volume or a large plane area.
[0054] Wherein, the method can be applied in an environment where the space volume is large, or the plane area is large, and there are many similar plane scenes, that is, the method can be applied when the space volume is larger than the s...
Embodiment 2
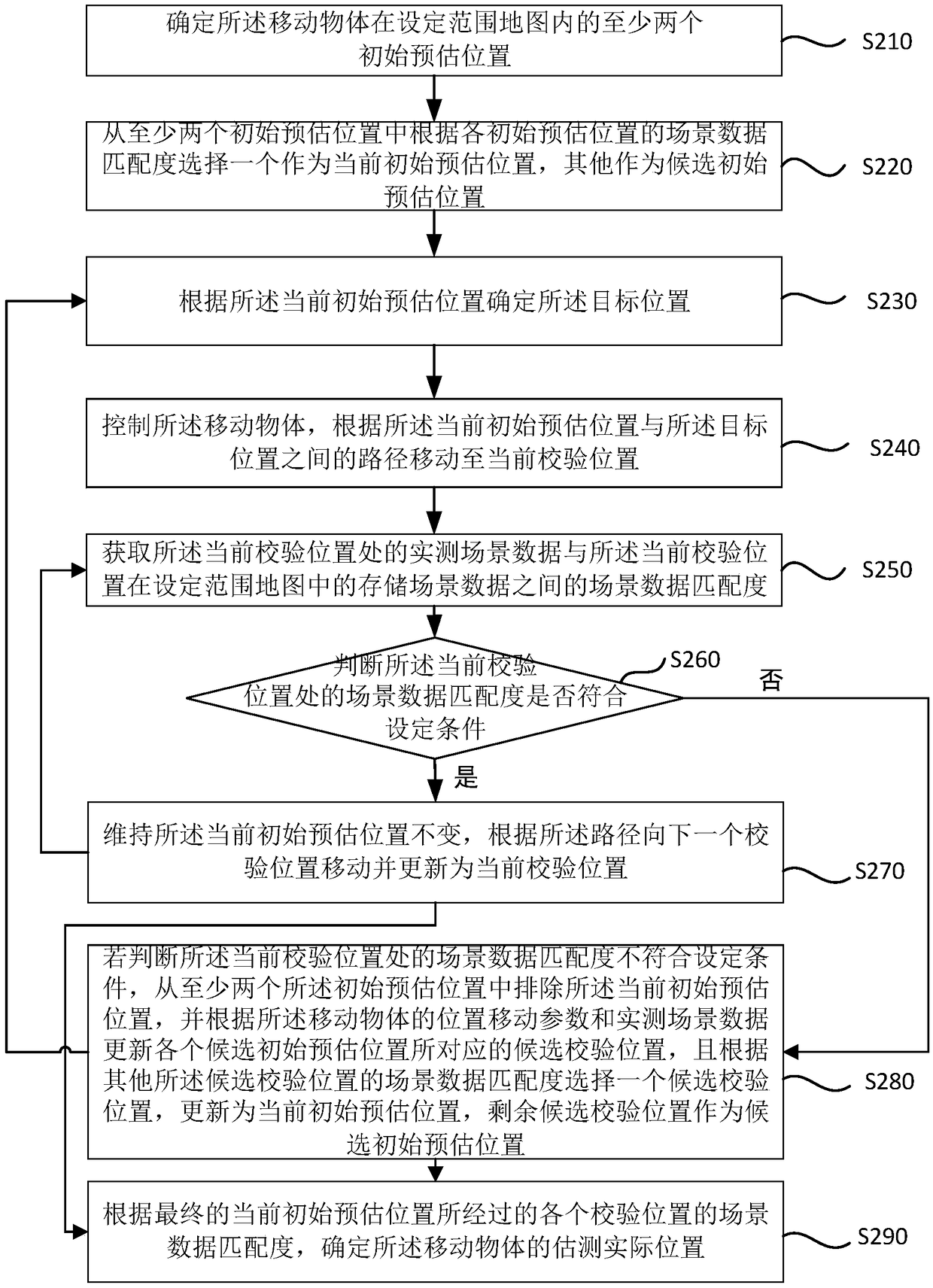
[0078] figure 2 It is a flow chart of a robot positioning method provided by Embodiment 2 of the present invention. This embodiment is based on the foregoing embodiments, and further provides a way to verify the position during the movement in the path, such as figure 2 As shown, the technical solution provided by the embodiments of the present invention includes the following steps:
[0079] S210: Determine at least two initial estimated positions of the robot within the set range map.
[0080] In this step, the number of initially estimated positions may be at least two, set as A1, A2, . . . and An, and n is a natural number greater than 1.
[0081] S220: Select one of the at least two initially estimated positions according to the scene data matching degree of each initial estimated position as the current initial estimated position, and the others as candidate initial estimated positions.
[0082] The initial estimated positions can be sorted according to the matching ...
Embodiment 3
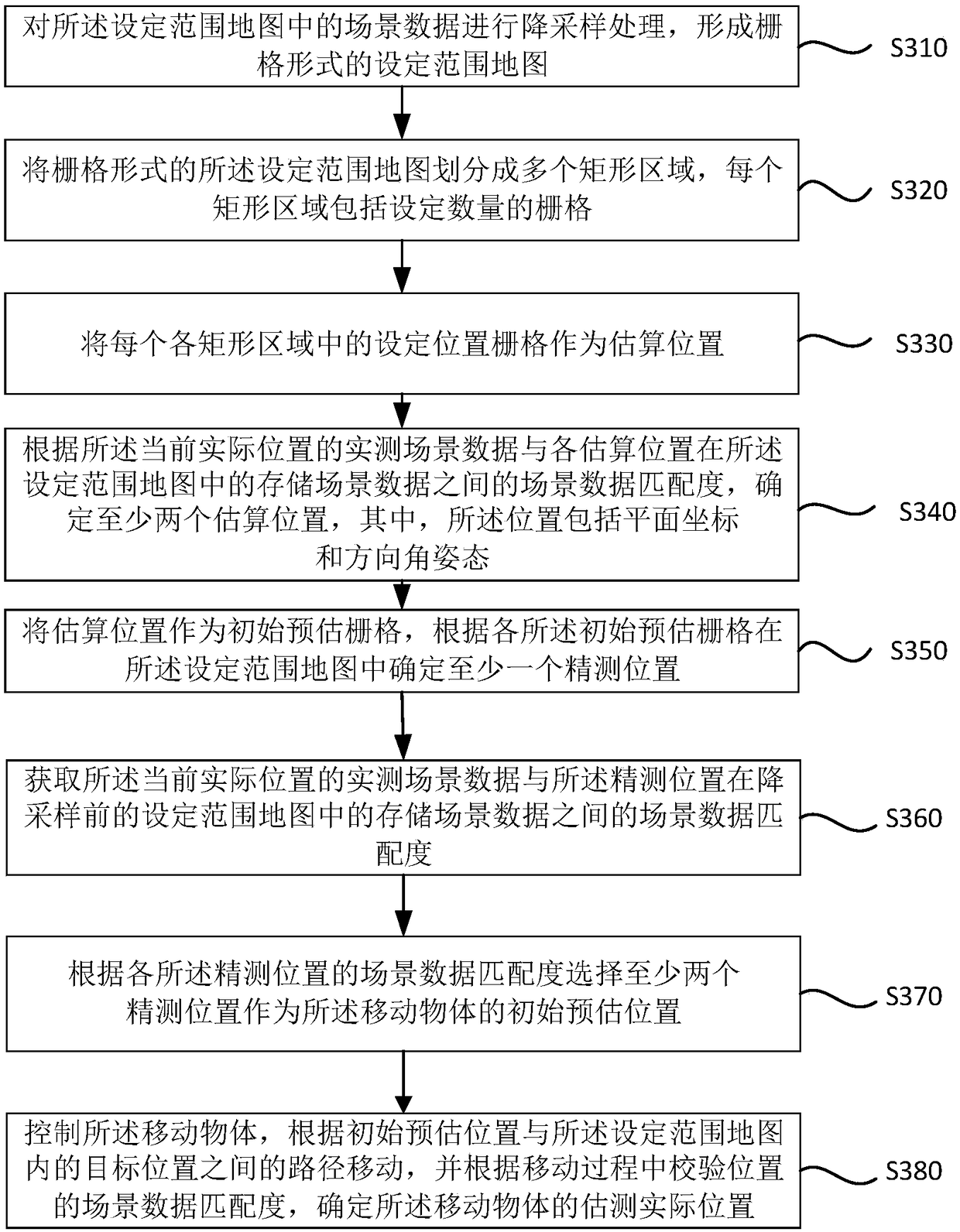
[0114] Figure 3a It is a flow chart of a robot positioning method provided by Embodiment 3 of the present invention. Based on the foregoing embodiments, this embodiment further provides a processing scheme for down-sampling the set range map to reduce the calculation during the relocation process. quantity. Such as Figure 3a As shown, the technical solutions provided by the embodiments of the present invention are specifically as follows:
[0115] S310: Perform down-sampling processing on the scene data in the set range map to form a set range map in the form of a grid.
[0116] In this step, the down-sampling processing of the scene data in the set range map may specifically be sampling the scene data in the set range map according to a set distance interval, thereby reducing the amount of scene data in the set range map, Reduce the amount of data processing to improve the positioning speed of the robot.
[0117] For example, if the range map is set to be a raster map, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More