

On-orbit self-calibration method for space target relative navigation vision measurement system
A technology of relative navigation and visual measurement, applied to measurement devices, instruments, etc., can solve the problems of camera parameter degradation, camera parameter change, unknown or uncontrollable occasions, etc., to achieve fast solution speed, high reliability, and simple algorithm. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
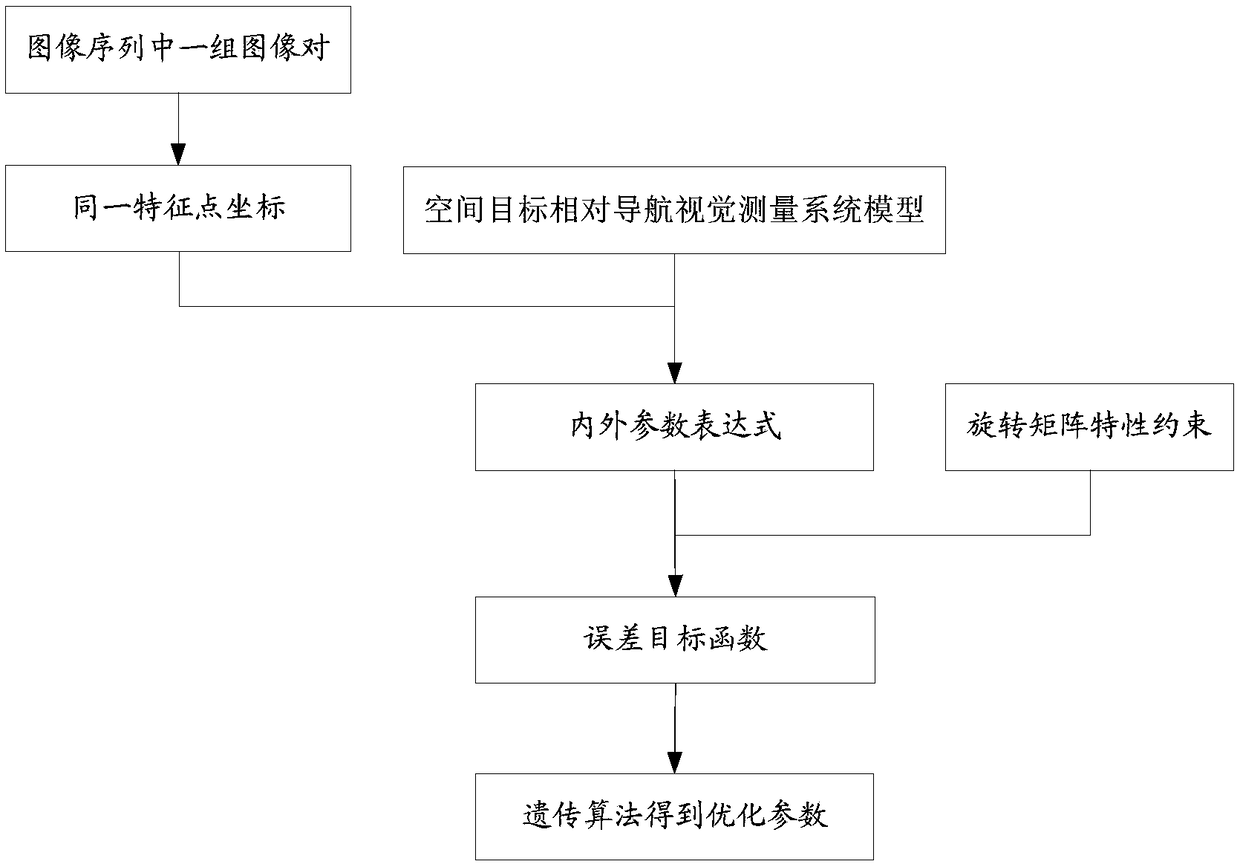
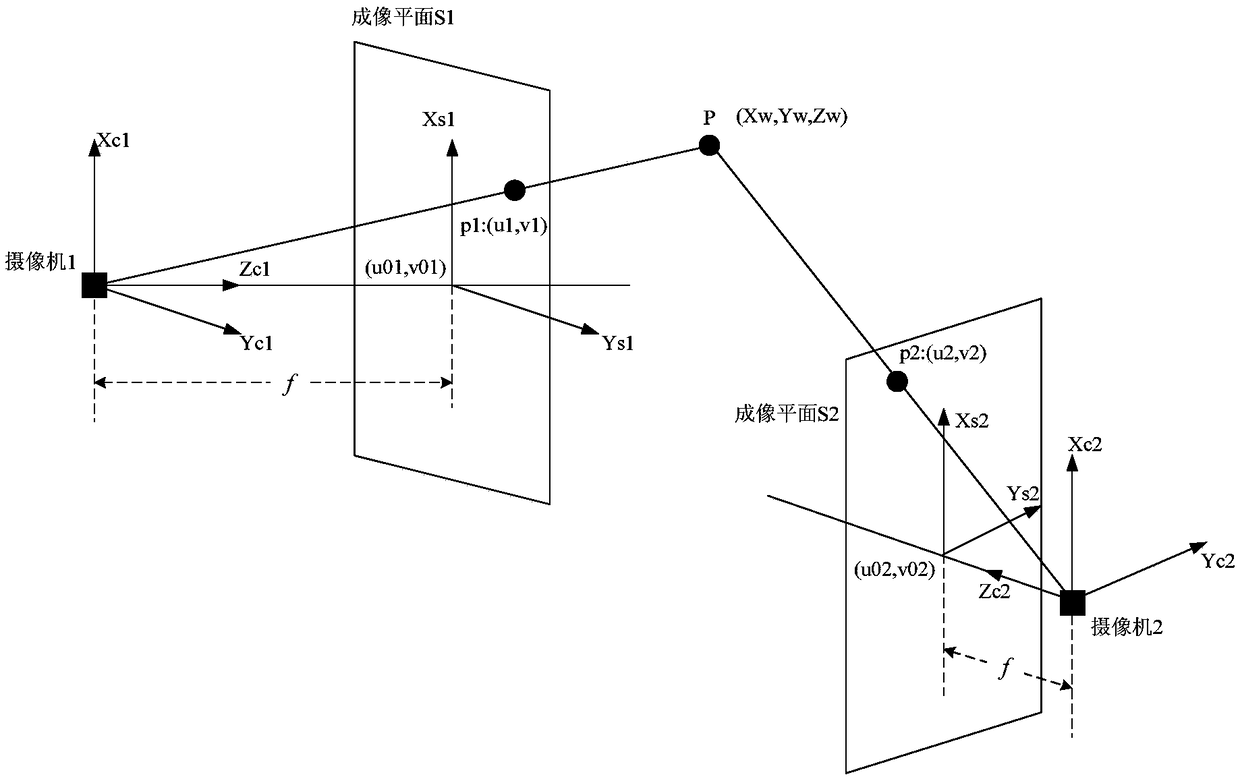
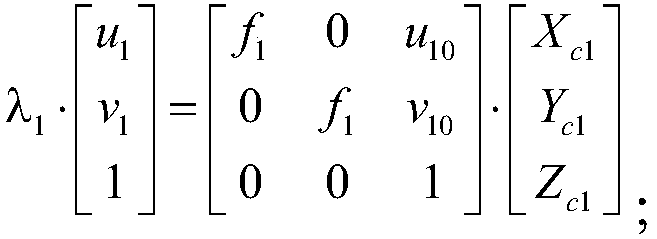
[0061] The basic idea of the present invention is: a new on-orbit self-calibration method for the space target relative navigation visual measurement system. Firstly, the space target relative navigation visual measurement system model is established based on the pinhole camera model; The identified common feature points get the expression of the internal and external parameters of the space target relative to the navigation visual measurement system; further obtain the ideal constraint equation of the internal and external parameter expression through the characteristics of the rotation matrix; finally construct the error function of the ideal constraint equation as the objective function, through the calculation The particle swarm optimization algorithm with the characteristics of fast speed initially obtains some parameters of the space target relative navigation visual measurement system, and then obtains all other parameters based on the expression of the internal and ext...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More