

Automatic driving steering system based on BP neural network and safe distance line moving working condition and control method thereof
A BP neural network, neural network control technology, applied in non-electric variable control, position/direction control, vehicle position/route/height control and other directions, can solve the problem of low degree of automatic driving, difficult to establish, and unable to achieve lateral steering of the car Function and other problems, to achieve the effect of solving modeling difficulties and good driving environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
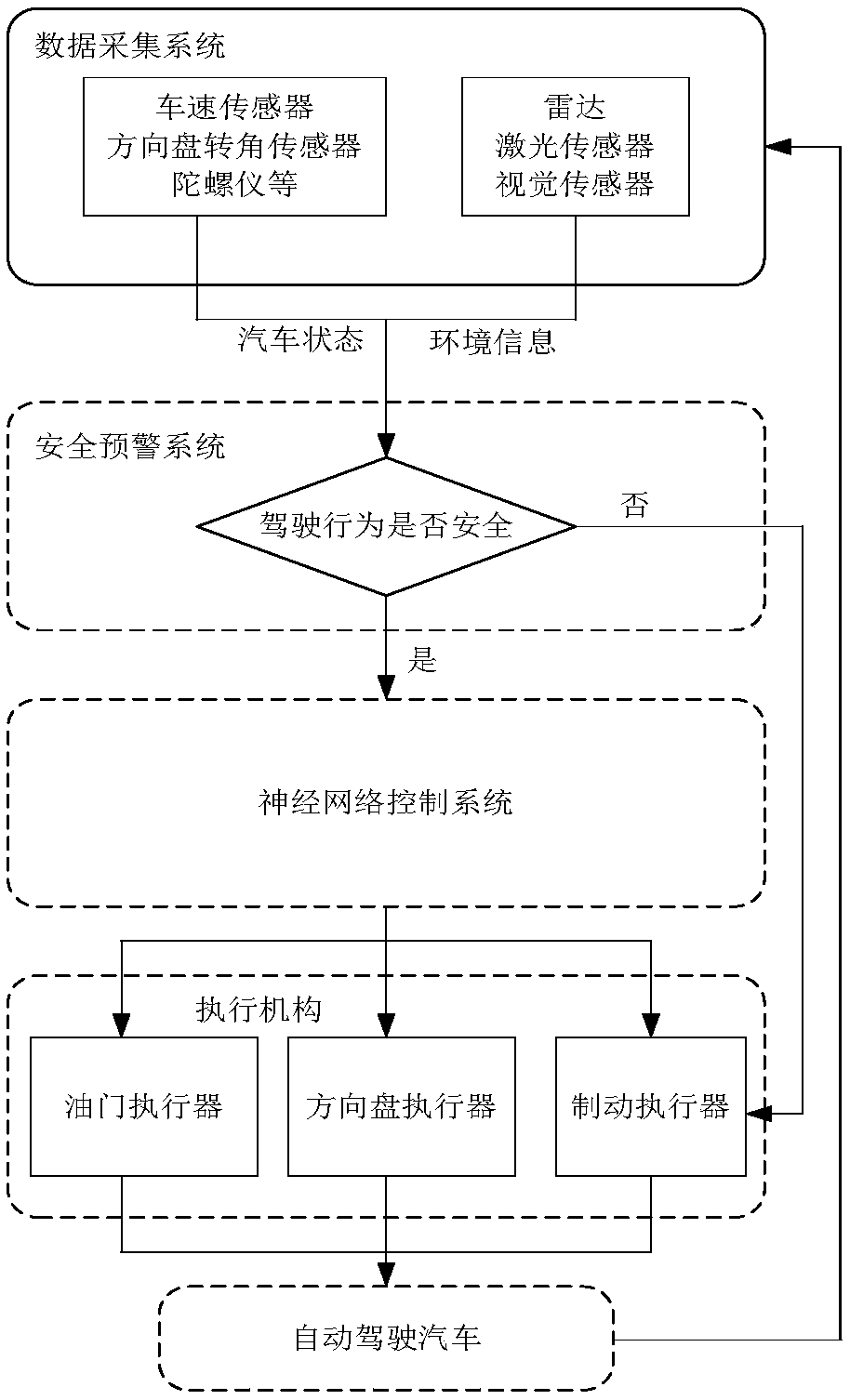
[0087] figure 1 It is a flowchart of a control system control strategy, and the specific steps of the method include:
[0088] Step 1: The smart car drives at a certain speed;
[0089] Step 2: The data acquisition system detects an obstacle with a width of y at a distance x in front, marks it as (x, y), and transmits it to the vehicle control platform together with the current vehicle status information;
[0090] Step 3: The safety warning system compares the current vehicle speed v and obstacle position information (x, y) with the database in the system to determine whether the smart car can be manipulated laterally; if there is a risk in the lateral manipulation process, perform step 4; If there is no risk, go to step 5;
[0091] Step 4: Perform longitudinal deceleration control on the vehicle according to the output of step 3, and return to step 2;
[0092] Step 5: According to the state information and the obstacle position information (x, y) output in step 2, the neura...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More