

Data-driven modeling based sd-arx-mpc control method for dct vehicles
A SD-ARX-MPC, SD-ARX technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of physical model modeling error, time-consuming, affecting control effect, etc., to improve performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
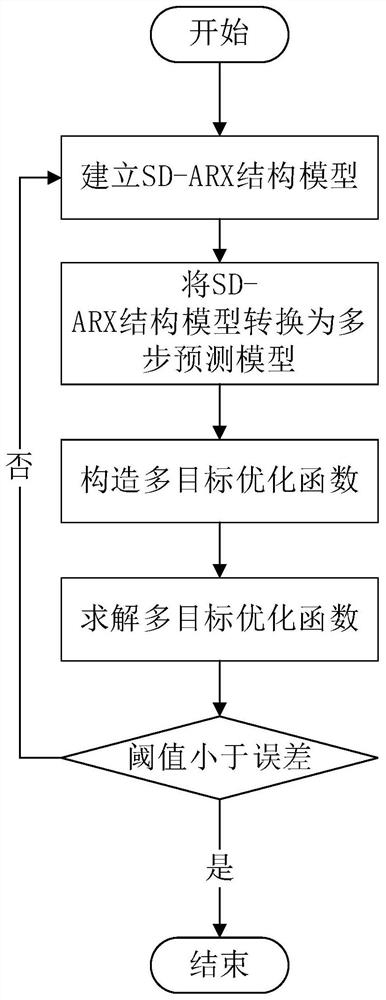
[0076] Such as figure 1 As shown, a DCT vehicle starting SD-ARX-MPC control method based on data-driven modeling includes the following steps:
[0077] 1) Collect DCT vehicle starting data during the running of the DCT vehicle to establish an SD-ARX structural model; the DCT vehicle starting data includes engine torque, clutch torque, driving resistance distance, and engine speed at the starting moment of the DCT vehicle during driving and clutch speed.
[0078] The method for setting up the SD-ARX structure model in step 1) may further comprise the steps:
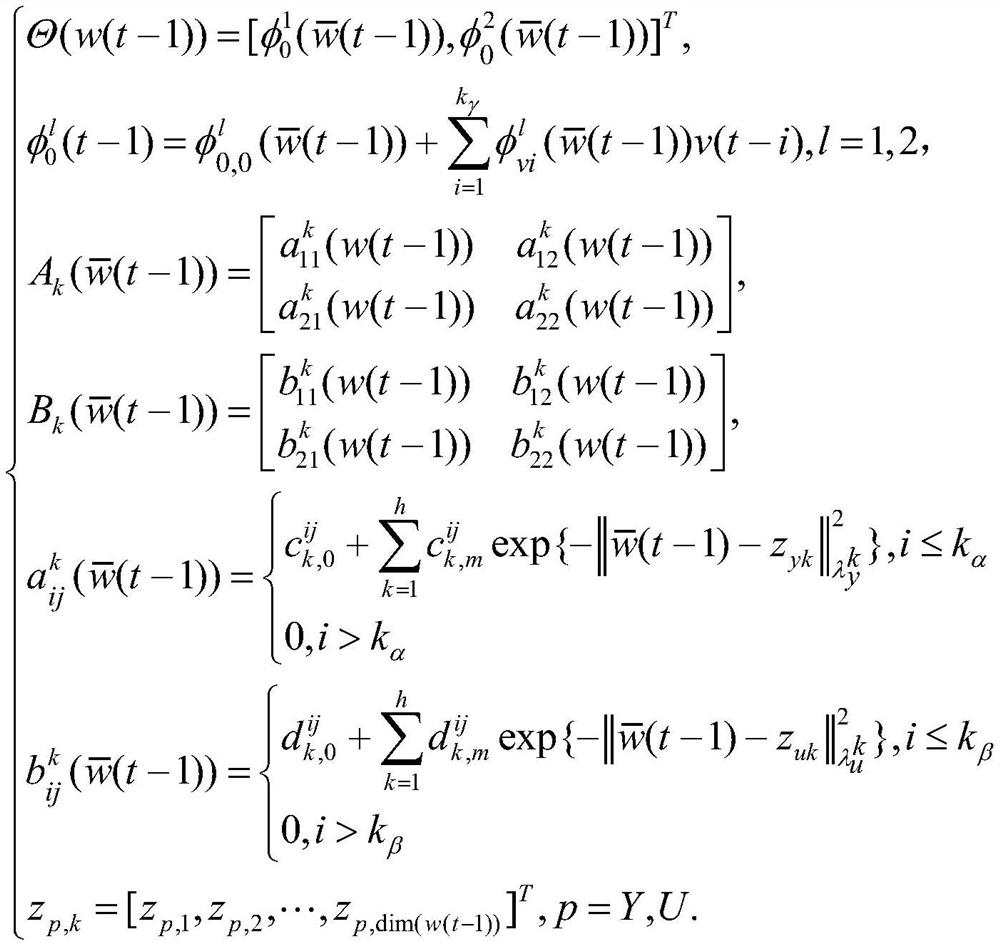
[0079] 1-1) Construct the ARX structural model, which is used for the nonlinear description of the starting process of the real vehicle, expressed by formula (1):
[0080]
[0081] In the formula, Y(t) is the prediction output of the ARX structural model, U(t) is the control input of the ARX structural model, Y(t-i) T is the output state of the known ARX structure model, U(t-i) T is the control variable of the known...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More